ОБРАБОТКА СИГНАЛОВ СПУТНИКОВОЙ РАДИОНАВИГАЦИИ В УСЛОВИЯХ МНОГОЛУЧЁВОСТИ
←
→
Транскрипция содержимого страницы
Если ваш браузер не отображает страницу правильно, пожалуйста, читайте содержимое страницы ниже
На правах рукописи
МИЛЮТИН Данила Святославович
УДК 621.391
ОБРАБОТКА СИГНАЛОВ СПУТНИКОВОЙ РАДИОНАВИГАЦИИ В
УСЛОВИЯХ МНОГОЛУЧЁВОСТИ
Специальность 05.12.14 - «радиолокация и радионавигация»
Автореферат диссертации
на соискание ученой степени кандидата технических наук
Научный руководитель -
д.т.н., профессор М. И. Жодзишский
Москва, 2010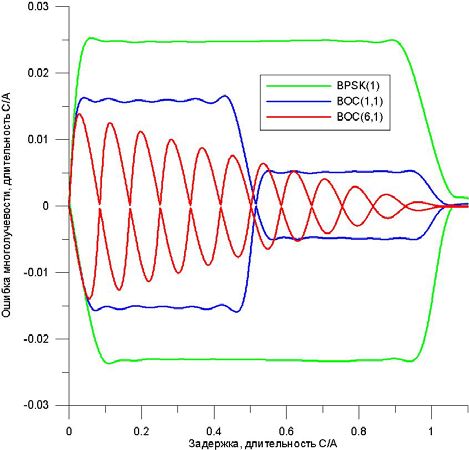
Работа выполнена на кафедре 402 «Радиосистемы управления и передачи
информации» Московского авиационного института (государственного технического
университета)
Научный руководитель: доктор технических наук, профессор
Жодзишский Марк Исаакович
Официальные оппоненты: доктор технических наук, профессор
Миронов Михаил Аркадьевич
старший научный сотрудник Военного учебно-научного
центра ВВС «Военно-воздушная академия имени Н. Е.
Жуковского и Ю. А. Гагарина»
кандидат технических наук
Булавский Николай Тадеушевич
начальник лаборатории закрытого акционерного
общества «Конструкторское бюро навигационных
систем»
Ведущая организация: ОАО «Российские космические системы»
Защита диссертации состоится 5 октября 2010 года на заседании диссертационного совета Д
212.125.03 при Московском авиационном институте (государственном техническом
университете) по адресу 125993, г. Москва, Волоколамское шоссе д. 4.
С диссертацией можно ознакомиться в библиотеке МАИ.
Дата рассылки автореферата: 7 сентября 2010
Ученый секретарь
диссертационного совета
Д 212.125.03
к.т.н., доц. Сычёв М.И.
2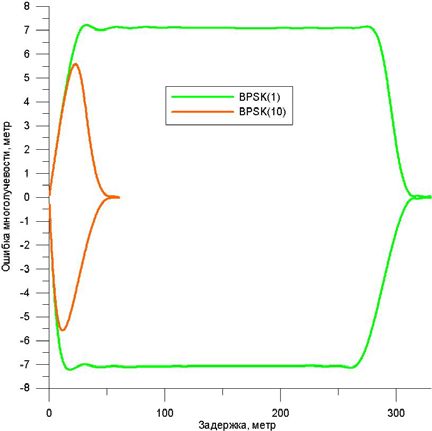
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность проблемы.
Важность задач навигации с помощью спутниковых радионавигационных
систем (GPS, ГЛОНАСС и др.) общеизвестна. Наиболее сложным и одним из
наиболее важных режимов спутниковой навигации является режим
высокоточного позиционирования в реальном времени (ВПРВ). Огромное
значение здесь имеет повышение точности и надёжности этого режима при
сохранении приемлемой простоты с учётом ограниченности ресурсов. В связи с
этим актуальным является как анализ основных источников ошибок, так и
построение алгоритмов, которые минимизируют влияние этих ошибок и
обеспечивают наибольшую точность и надёжность. Именно этим основным
двум проблемам и посвящена данная работа.
Цель и задачи работы.
1) анализ и уменьшение основных ошибок при точном позиционировании
(ошибок многолучёвости, межканальных сдвигов, шумовых ошибок и др.) в
частности, разработка методики для анализа этих ошибок.
2) разработка алгоритмов высокоточного позиционирования для создания
программы ВПРВ с лучшими характеристиками, чем у прототипов.
Методы исследования.
При исследовании задачи ВПРВ используется теория матриц, методы
математической статистики и теории вероятностей (в частности, методы
наименьших квадратов (МНК) и калмановской фильтрации (КФ)), анализ
функций многих переменных и численные методы.
При разработке методики для анализа ошибок многолучёвости
использованы методы анализа функций многих переменных, численные методы,
методы математической статистики и теории вероятностей, методы теории
случайных процессов.
Научная новизна.
1) разработана методика для анализа основных типов ошибок
навигационных измерений (многолучёвости, межканальных сдвигов и др.),
обеспечивающая бóльшую точность по сравнению с известными методиками
расчёта. Эта методика позволяет анализировать как старые сигналы GPS, так и
сигналы, которые ещё не введены в эксплуатацию в системе Galileo и др.
Предложенная методика обеспечивает так же приемлемую простоту и скорость
вычисления.
32) Разработан алгоритм оптимального (по критерию максимального
правдоподобия) использования вторых разностей измерений ГЛОНАСС при
позиционировании и фильтрации неоднозначностей, который позволяет
существенно сократить число операций с плавающей точкой.
3) Разработан метод фильтрации неоднозначностей, более точный,
устойчивый, экономный с точки зрения вычислений, чем в известных аналогах.
Он позволяет провести корректный учёт изменений наблюдаемого
спутникового созвездия: смена опорного спутника, появление/исчезновение
спутника.
4) Разработан алгоритм быстрого перебора спутников при отбраковке
аномальных измерений.
Практические результаты работы.
1) Разработанные теоретические результаты легли в основу программного
продукта, с помощью которого на фирме «Топкон» рассчитываются ошибки
многолучёвости, трактовые смещения, шумовые ошибки при работе с
сигналами систем GPS, ГЛОНАСС, Galileo.
2) Разработанная теория позволила создать версию программы ВПРВ,
которая показала лучшие свойства, чем прототип.
Внедрение результатов подтверждено актом, в котором отражены
перечисленные практические результаты работы.
Основные положения, выносимые на защиту:
1) Предложенная в диссертации методика расчёта корреляционных
компонент, основанная на автокорреляционной функции псевдослучайного
кода, позволяет с высокой точностью рассчитывать ошибки для новых сигналов
спутниковых радионавигационных систем. Она также позволяет существенно
уточнить расчёт ошибок при наличии некоторых кодов Голда в GPS.
2) Выведенные в диссертации уравнения, основанные на комбинации
произведений квадратурных компонент, позволяют с высокой степенью
точности вычислять кодовые ошибки многолучёвости и их огибающие.
3) Использование предложенных в диссертации комбинаций, являющихся
аналогом вторых разностей, позволяет оптимальным образом обрабатывать их
без вычисления их ковариационной матрицы и обратной к ней матрицы, что
существенно упрощает вычисления при позиционировании и при фильтрации
неоднозначностей.
4) Предложенные в диссертации алгоритмы фильтрации
неоднозначностей корректно учитывают такие изменения в созвездии, как
4появление/исчезновение спутника и смена опорного спутника. Это даёт
существенный выигрыш, так как при указанных ситуациях не требуется
сбрасывать фильтр и терять накопленную в нём информацию.
5) Разработанный в диссертации алгоритм быстрого перебора позволяет
осуществлять схему перебора с существенно меньшим числом действий.
КРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении произведен обзор научной литературы по данной тематике,
обосновывается актуальность работы, сформированы цели и задачи
исследования, методы их решения, приводятся основные положения,
выносимые на защиту, объем и структура работы.
В первой главе рассматриваются спутниковые радионавигационные
системы и основные ошибки позиционирования.
В системах GPS и ГЛОНАСС используются сигналы, представляющие
собой гармоническое колебание, модулированное псевдослучайной
последовательностью. Использование таких сигналов позволяет добиться
высокой помехоустойчивости и одновременной работы со многими
спутниковыми сигналами. У системы GPS используется кодовое разделение
сигналов, у системы ГЛОНАСС – частотное. По мере модернизации систем
GPS и ГЛОНАСС планируется модифицировать излучаемые сигналы. Для
системы ГЛОНАСС планируется ввести кодовое разделение сигналов на основе
BOC-модуляции. Для системы GPS вводятся сигналы L2С, которые
представляют собой два мультиплексированных во времени BPSK-сигнала. В
разрабатываемой системе Galileo будут использоваться BOC-
последовательности. Использование столь различных псевдослучайных
последовательностей приводит к существенным различиям в характеристиках
ошибок кодовой многолучёвости.
Далее рассматривается задача позиционирования. Приёмник, позицию
которого требуется определить, называется ровером (rover). Для повышения
точности позиционирования используют также приёмник с известной позицией.
Такой приёмник называют базой (base). Расстояние между ровером и базой
называется базовой линией. Каждый приёмник имеет два типа измерений –
кодовые и фазовые. Кодовые измерения являются однозначными, но с большим
среднеквадратическим отклонением ошибки (порядка 1-10 м.). Фазовые
измерения являются точными (1 см.), но неоднозначными, то есть известны с
точностью до целого числа циклов.
Среди основных режимов позиционирования рассмотрены режим
одиночного позиционирования, режим дифференциального позиционирования
по кодовым измерениям, режим высокоточного позиционирования в реальном
5времени с использованием фазовых измерений. Одиночное позиционирование
имеет точность ориентировочно 10 м. Дифференциальное позиционирование
имеет точность порядка 0.5–1 м (при не слишком тяжёлых условиях работы).
Такая точность достигается за счёт использования поправок с базы. Режим
ВПРВ имеет самую высокую точность 1-3 см в кинематике. Такая точность
достигается за счёт совместного использования кодовых и фазовых измерений
ровера и базы. В статике за счёт усреднения решения точность ВПРВ может
достигать единиц миллиметров на небольших базовых линиях.
На небольших базовых линиях ошибка кодовой многолучёвости
оказывает наиболее существенное влияние на точность в режиме
дифференциального кодового позиционирования. В наиболее интересном нам
режиме ВПРВ ошибка многолучёвости влияет на точность так называемого
решения с плавающей точностью (float-решения), т.е. решения, полученного из
совместной обработки кодовых и фазовых измерений ровера и базы до
целочисленного разрешения. Плавающие (float) оценки неоднозначностей фаз
получаются в результате совместной обработки кодовых и фазовых измерений
с помощью фильтра Калмана или рекуррентного МНК. При использовании
условия целочисленности неоднозначностей из оценок плавающих
неоднозначностей (float) можно получить оценки целочисленных (fixed)
неоднозначностей, используя которые можно добиться точности
позиционирования 1–3 см. Переход от плавающих неоднозначностей к
целочисленным осуществляется с помощью процедуры целочисленного
разрешения, в которой существенным звеном является критерий правильности
фиксации. Чем точнее изначальная оценка плавающих неоднозначностей, тем
быстрее принимается решение о правильности фиксации. Следовательно, на
небольших базовых линиях ошибки кодовой многолучёвости более всего
влияют на скорость разрешения неоднозначностей. Фазовая многолучёвость
наиболее влияет на точность позиционирования.
Для борьбы с ошибками многолучёвости рассмотрен стробовый метод
для BPSK-сигналов и метод специальной структуры сигнала, например, BOC-
сигналы. Большой практический интерес представляет оценка максимальных
величин ошибок многолучёвости – огибающих – при этих сигналах.
Рассмотрение простейшей модели одного отражённого сигнала позволяет
оценить влияние многолучёвых ошибок и при большем числе сигналов.
Следовательно, уменьшение огибающих для простейшей модели приводит к
уменьшению огибающих для более общего случая.
Вторая глава посвящена разработке алгоритмов расчёта основных
ошибок измерений, в частности, ошибок многолучёвости. Входной сигнал
рассматривается в виде
6s (t ) = Π (t − τ 0 ) cos(ωt + ϕ0 ) ,
где
Π (t ) = ∑ ak y0 (t / Δ − k ), y0 (t ) =
k
{
1, t ∈ [0;1)
0, t ∉ [0;1)
– псевдослучайная последовательность (ПСП). Коэффициенты ak = ±1 задают
псевдослучайную последовательность и образуют псевдошумовой код (ПШК).
Приёмник условно разбивается на блоки согласно схеме на рис.1.
Аналогово-
Аналоговая часть цифровой Коррелятор Канальные алгоритмы
преобразователь
Рис. 1.
Для расчёта аналоговой части и аналогово-цифрового преобразователя (АЦП)
используется известная методика приближённого расчёта. В диссертации
проделаны строгие математические выкладки, которые подтверждают верность
указанной методики расчёта.
В результате рассмотрения в диссертации методов расчёта
корреляционных компонент сделаны следующие выводы:
1. Необходимо учитывать структуру кода входной псевдослучайной
последовательности. Для этого необходимо вычислить взаимно
корреляционную функцию псевдошумового кода как эргодическое среднее:
cn = ak ak + n k .
2. Расчёт корреляционных компонент осуществляется сначала для
входного сигнала без учёта результирующего фильтра, т.е. фильтра,
эквивалентного результирующему действию всего аналогового тракта. Далее
производится их коррекция для учёта результирующего фильтра.
3. Расчёт осуществляется по следующим формулам
Для опорной последовательности, соответствующей исходной имеем
корреляционную функцию
1
Π (t )Π (t − τ ) t = ∑ ck R (τ / Δ − k ), ck = am am + k m
, R( s) = ∫ y0 ( s + t )dt .
k 0
Для опорной последовательности
⎡ a + ak −1 a − ak −1 ⎤
Π r (t ) = dΠ (t ) = ∑ ⎢ k f 0 (t / Δ − k ) + k f1 (t / Δ − k ) ⎥ ,
k ⎣ 2 2 ⎦
которая представляет собой набор реакций на переходы и непереходы в коде,
имеем корреляционную функцию
⎡ c + ck −1 c − ck −1 ⎤
Π (t )dΠ (t − τ ) t = ∑ ⎢ k K 0 (τ / Δ − k ) + k K1 (τ / Δ − k ) ⎥ ,
k ⎣ 2 2 ⎦
71 1
K 0 ( s ) = ∫ f 0 ( s + t )dt , K1 ( s ) = ∫ f1 ( s + t )dt .
0 0
Здесь f 0 (t ), f1 (t ) задают стробы, т.е. реакции на переходы и непереходы.
4. Учитываем влияние результирующего фильтра, сворачивая
полученные компоненты с его низкочастотной импульсной характеристикой
g(t ) :
+∞ +∞
C (τ ) + i ⋅ S (τ ) = ∫
0
g(τ − s ) Π (t )Π (t − s ) ds , dC (τ ) + i ⋅ dS (τ ) = ∫ g(τ − s)
0
Π (t )dΠ (t − s) ds
Корреляционные компоненты I,Q,dI,dQ вычисляются согласно соотношениям
I (τ , ϕ ) + i ⋅ Q(τ , ϕ ) = [C (τ ) + i ⋅ S (τ )]ei ϕ , dI (τ , ϕ ) + i ⋅ dQ(τ , ϕ ) = [dC (τ ) + i ⋅ dS (τ )]ei ϕ .
Далее рассматриваются алгоритмы получения межканальных смещений и
ошибок многолучёвости. Для получения межканальных смещений необходимо
решить систему уравнений:
⎧⎪Q (τ , ϕ ) = 0 : C (τ ) sin ϕ + S (τ ) cos ϕ = 0
⎨ .
⎪⎩dI (τ , ϕ ) = 0 : dC (τ ) cos ϕ − dS (τ ) sin ϕ = 0
Корни этой системы являются межканальными смещениями по коду и по фазе.
Для расчёта ошибок многолучёвости рассматривается модель одного
зеркально отражённого сигнала, при котором на вход приёмника поступает
смесь прямого и отражённого сигналов
s (t ) = Π (t ) cos(ω t ) + α ⋅ Π (t − δ ) cos(ω (t − δ ) + ψ ) .
Для этого суммарного сигнала корреляционные компоненты выражаются
через корреляционные компоненты прямого сигнала с помощью равенств
CΣ (τ ) = C (τ ) + α ( C (τ − δ ) cosψ ′ + S (τ − δ ) sinψ ′ ) ,
dCΣ (τ ) = dC (τ ) + α ( dC (τ − δ ) cosψ ′ + dS (τ − δ ) sinψ ′ ) ,
.
SΣ (τ ) := S (τ ) + α ( −C (τ − δ ) sinψ ′ + S (τ − δ ) cosψ ′ ) ,
dSΣ (τ ) := dS (τ ) + α ( −dC (τ − δ ) sinψ ′ + dS (τ − δ ) cosψ ′ ) , ψ ′ = ψ + ωCδ
Система для определения многолучёвых ошибок принимает вид
⎧⎪QΣ (τ , ϕ ) = 0 : CΣ (τ ) sin ϕ + SΣ (τ ) cos ϕ = 0
⎨ .
⎪⎩dI Σ (τ , ϕ ) = 0 : dCΣ (τ ) cos ϕ − dSΣ (τ ) sin ϕ = 0
В диссертации получено следующее уравнение для определения ошибки
кодовой многолучёвости
Z (τ ) + α 2 Z (τ − δ ) + α ⎡⎣ X (τ ; δ ) cos (ωcδ + ψ ) + Y (τ ; δ ) sin (ωc δ + ψ ) ⎤⎦ = 0 ,
где компоненты X , Y , Z выражаются через C , S , dC , dS по формулам
Z (τ ) = C (τ )dC (τ ) + S (τ )dS (τ )
X (τ ; δ ) = C (τ ) dC (τ − δ ) + C (τ − δ ) dC (τ ) + S (τ ) dS (τ − δ ) + S (τ − δ ) dS (τ )
Y (τ ; δ ) = C (τ ) dS (τ − δ ) + S (τ − δ ) dC (τ ) − S (τ ) dC (τ − δ ) − C (τ − δ ) dS (τ )
8Верхнюю и нижнюю огибающие ошибки кодовой многолучёвости следует
искать как решения уравнений:
Z (τ ) + α 2 Z (τ − δ ) ± α X (τ ; δ ) + Y (τ ; δ ) = 0 .
2 2
Далее приводятся результаты расчёта для некоторых сигналов.
На рис.3 приводятся огибающие ошибки многолучевости для сигналов
BOC(1,1) и сигнала BOC(6,1). Эти результаты показывают, что максимальная
ошибка многолучевости для сигнала BOC(6,1) сравнима с сигналом BPSK(10).
Рис.2 Рис.3
В диссертации также было исследовано влияние т.н. «аномальных» кодов
Голда (то есть, кодов Голда, автокорреляционная функция которых
существенно отличается от треугольной) на подавление ошибки
многолучевости при использовании стробов специальной формы
(асимметричные стробы) в качестве опорных сигналов в корреляторах
навигационного приемника фирмы Topcon.
Рис.4
9На рис. 4 приводятся огибающие ошибки многолучевости для таких кодов.
При использовании таких стробов для спутников с «аномальных» кодами
ошибка многолучевости подавляется менее эффективно по сравнению с
«нормальными» кодами, у которых автокорреляционная функция которых
близка к треугольной.
В третьей главе приведено подробное описание задачи ВПРВ.
Рассматривается универсальная модель наблюдения для всех трёх систем GPS,
ГЛОНАСС, Galileo. Такая модель может быть записана в виде:
ρ rf,k, s = Rrf,k, s + c(τ r ,k + δτ r(,ρk) f , s − τ ks ) + Trs,k + μ +ζ r(,ρk ) f , s
f / f ref , s s, f
I r ,k ref +
(1)
ϕrf,k, s = Rrf,k, s + c(τ r ,k + δτ r(ϕ,k) f , s − τ ks ) + Trs,k − μ I r ,k ref + λ f , s ( M rf , s +ψ rs,k ) + +ζ r(,ϕk) f , s
f / f ref , s s, f
Здесь введены следующие обозначения:
• f – номер диапазона частот (диапазонов может быть больше двух), s –
номер спутника, r – номер приёмника, k – момент времени, c – скорость
света;
• ρ rf,k, s , ϕrf,k, s – кодовые и фазовые измерения (в метрах) по линии
визирования спутник-приёмник;
• rrs,k – радиус-вектор координат спутника на момент излучения сигнала
• rr ,k – радиус-вектор координат приёмника.
• Rrf,k,s = R(rr ,k + b rf,,ks , rrs,k + crf,,ks ) – расстояние от фазового центра излучающей
антенны спутника до фазового центра принимающей антенны приёмника,
где
o R (r, r′) := r − r′ + c −1Ωe ({r′}x ⋅{r}y − {r′}y ⋅{r}x ) – геометрическое
расстояние от спутника с радиус-вектором r′ до точки с радиус-
вектором r плюс поправка, учитывающая вращение Земли, Ωe –
угловая скорость вращения Земли;
o b rf,,ks – вектор смещения фазового центра принимающей антенны
приёмника для диапазона f относительно основания антенны; этот
вектор зависит от направления на спутник s .
o crf,,ks – вектор смещения фазового центра излучающей антенны
спутника для диапазона f относительно центра масс спутника; это
смещение зависит в общем случае от направления на приёмник r .
• λ f ,s – длины волн;
• μ f / f , s = (λ f ,s λ f , s )2 – ионосферное (частотное) отношение, где f ref – номер
ref ref
опорной частоты;
10• τ ks , τ r ,k – уход часов спутника и приёмника соответственно относительно
системного времени, δτ r(,ρk) f , s , δτ r(ϕ,k) f , s – трактовые задержки. Как правило,
практически не меняются во времени и являются одинаковыми для
одинаковых моделей приёмников.
• Trs,k , I rs,k – ошибки, обусловленные влиянием тропосферы и ионосферы;
• M rf ,s ≡ N rf ,s + ϕrf,0,s – плавающие неоднозначности, float ambiguities; N rf ,s –
целочисленные неоднозначности, integer ambiguities, fixed ambiguities;
ϕrf,0, s = ϕ0f , s − ϕ rf,0 – начальная фаза представляет собой начальную фазу
спутника минус начальную фазу опорного генератора приёмника.
• ψ rs,k = ψ r(,⊥k),s +ψ r(&,k),s – набег фаз, обусловленный изменением взаимной
ориентации антенн приёмника и спутника. Состоит из линейного набега
ψ r(,⊥k), s , обусловленного поворотами антенн в плоскости своих диполей и
нелинейного набега ψ r(&,k),s , обусловленного взаимным отклонением
нормалей к плоскостям диполей антенн от линии визирования;
• ζ r(,ρk ) f ,s , ζ r(,ϕk) f ,s – ошибки измерений. Оценочно полагается, что шумовая
ошибка фаз имеет СКО 1 см, а кодов – 1 м.
Кроме измерений ρ rf,k, s , ϕrf,k, s также используется отношение сигнал/шум,
обозначаемое далее символом SNRrf,k, s .
Далее приводятся способы учёта входящих в уравнения неизвестных, в
частности, ухода часов спутников, тропосферной и ионосферной задержек.
Описаны характеристики ошибок наблюдения. В ошибки наблюдения
включены также ошибки многолучёвости, которые являются коррелированным
процессом. Обосновывается использование модели гауссового белого шума
(ГБШ) в силу того, что реальные характеристики процесса неизвестны, а также,
что ошибка оценивания траектории при использовании истинной модели
шумов оценивается сверху с помощью модели ГБШ. Полагаем, что
среднеквадратическое отклонение (СКО) для шумов выбрано как произведение
СКО для зенитного спутника и функции пересчёта на спутник с произвольным
углом места. Функция пересчёта зависит от угла места спутника и его
отношения сигнал/шум.
Далее рассматривается переход к использованию первых разностей (ПР)
измерений, т.е. разностей между измерениями ровера и базы. В первых
разностях исключается влияние ухода часов спутника, начальной фазы
спутника, ошибки координат спутников, для приёмников одинаковых моделей
исключаются межтрактовые смещения, для коротких базовых линий
исключается влияние ионосферы.
11При рассмотрении вторых разностей, то есть разностей измерений между
спутниками, в диссертации сделаны следующие выводы:
1. Для спутников системы ГЛОНАСС с различными длинами волн λ f , s
переход ко вторым разностям для фаз, взятых в метрах, исключают уход часов,
но не исключает начальные фазы, вклад которых остаётся с маленьким
коэффициентом. Напротив, переход ко вторым разностям в циклах позволяет
исключить начальную фазу, но оставляет уход часов, вклад которого
пропорционален приращению литерных частот.
2. Наличие одного общего опорного спутника приводит к корреляции
между измерениями, как в системе GPS, так и в системе ГЛОНАСС. Учёт этой
корреляции требует существенных вычислительных затрат при традиционном
подходе, т.е. при вычислении ковариационной матрицы вторых разностей и
формировании обратной к ней весовой матрицы. В связи с этим в диссертации
разработаны более экономичные алгоритмы использования вторых разностей.
Далее в диссертации рассматривается задача позиционирования в
следующих случаях: одиночное позиционирование по кодам,
позиционирование по ПР кодовых измерений, позиционирование по ПР
однозначным фаз, позиционирование по приращениям полных фаз,
позиционирование по приращениям ПР полных фаз. Для всех этих случаев
выписаны уравнения наблюдения. На основании рассмотренных случаев сделан
следующий вывод: все уравнения для определения позиции приводятся к виду
ykf , s + Cykf , s = R0,s k + cτk + λ f , sψkf + ζk( y ) f , s . (2)
при условии, что все побочные параметры скомпенсированы. Здесь
• ykf ,s означает кодовое или фазовое измерение ровера, приведенное к
единицам длины за вычетом тропосферных коррекций;
• Cykf ,s означает коррекцию к измерению в единицах длины. Для каждого
режима коррекция формируется специальным образом.
• cτk представляет собой аналог ухода часов приёмника;
• ψkf представляет собой аналог начальной фазы плюс набег, связанный с
поворотом антенных диполей. При этом нелинейный набег фаз,
связанный с изменением ориентации спутника и приёмника, либо
отсутствует в кодовых измерениях, либо сокращается за счёт взятия ПР
или приращений в фазовых измерениях;
• λ f ,s представляет собой аналог длины волны;
• ζk( y ) f ,s – шумы наблюдения.
12Подобная запись позволяет рассматривать все режимы одинаковым образом.
Это упрощает выбор алгоритма обработки, так как он будет единым для всех
измерений вида (2). При решении уравнений (2) с помощью МНК получается
оценка вектора координат и её ковариационная матрица за одну эпоху. Если на
изменение вектора координат во времени наложено дополнительное
ограничение, то полученная оценка усредняется с помощью КФ или
рекуррентного МНК. Для кодовых измерений имеем λ f , s = 0 , поэтому
необходимо дополнительно полагать ψkf = 0 .
Далее рассматривается задача определения неоднозначностей. Оценку
неоднозначностей предлагается искать методом максимального правдоподобия.
Решение разбивается на два этапа. На первом этапе находятся плавающие
неоднозначности, без учёта условия целочисленности. Для этого используется
фильтр Калмана или рекуррентный МНК. На втором этапе, используя условие
целочисленности, получаются фиксированные неоднозначности.
При рассмотрении задачи используются следующие уравнения
наблюдения
ρ kf , s = R0,s k + c(τ k + δτ k( ρ ) f ) + μ I ks + ζ k( ρ ) f , s
f / f ref , s
f / f ref , s
. (3)
ϕkf , s = R0,s k + c(τ k + δτ k(ϕ ) f ) − μ I ks + λ f , s ( M f , s + ψ k( ⊥ ) ) + ζ k(ϕ ) f , s
В записи этих уравнений
• для краткости опущен оператор взятия первых разностей;
• дальности приведены к основанию антенны
• R0,s k – геометрическая дальность до основания антенны ровера
• в левой части уравнений стоят измерения, в которых скомпенсированы
расчётная дальность до базы, вклад тропосферы, набег фаз,
обусловленный изменением взаимной ориентации спутника и приёмника,
смещения фазовых центров антенны
• межтрактовые сдвиги не меняются от спутника к спутнику
• I ks – означает первые разности ошибок ионосферы для опорной частоты.
Рассмотрено два варианта фильтрации неизвестных: фильтрация первых
разностей, в которой в качестве неизвестных выступают
r0, k , cτ k ,ψ k( ⊥ ) ,{cδτ ( ρ ) f } f ≠ fref ,{M f , s } f , s ,{I s }s ,
и фильтрация вторых разностей, в которой в качестве неизвестных выступают
{cτ k + cδτ ( ρ ) f + μ I s } f ,{ψ k( ⊥ ) + M − 2μ
f / f ref , s s , sref f , sref f / f ref , s s , sref
∇ ∇ I s }f ,
s , sref s , sref
r0, k ,{∇ N f } f , s ≠ sref ,{∇ I s }s ≠ sref ,
где переменные первой строки исключаются во вторых разностях, символ ∇ s , s ref
означает взятие вторых разностей. Для короткой базовой линии возникает
13дополнительное условие I ks , f = 0 , то есть влияние ионосферы исключается из
ref
рассмотрения.
После фильтрации неоднозначностей производится целочисленное
разрешение. Целочисленное разрешение заключается в поиске такого
целочисленного вектора N̂ , который минимизирует функционал
)T D
q(N) = (N − N (N − N
). (4)
– вектор плавающих оценок вторых разностей неоднозначностей, D
где N его
информационная (обратная к ковариационной) матрица. Предлагается
использовать готовый алгоритм целочисленного разрешения.
В случае наличия оценки вектора координат задачу разрешения
неоднозначностей можно существенно упростить, решая т.н. обратную задачу,
которая сводится к округлению вторых разностей отклонений фаз с
дополнительным учетом влияния часов приёмника для системы ГЛОНАСС.
Это делается, например, для определения неоднозначностей новых спутников в
созвездии.
Далее в работе рассмотрены отбраковщики аномалий. Все типичные
отбраковщики аномалий рассматриваются по следующей схеме.
Измерения
Определение вектора
состояния
Вычисление невязок
Критерий согласованности
измерений
Измерения
да нет
согласованы?
Измерения Поиск и отбраковка
согласованы аномальных измерний
Уточнение вектора
состояния
Возможно ли определить
нет вектор состояния по да
оставшимся измерениям?
Все измерения
отбракованы
Рис 5.
14Приводится следующее обоснование введения индикаторов
(отбраковщиков) аномалий. При непосредственной обработке аномального
измерения в задачу позиционирования или в задачу оценки неоднозначностей
произойдёт искажение вектора состояния. Поэтому аномальные измерения
необходимо отбраковывать и решать задачу на данную эпоху заново. Оценка
неоднозначностей по всей совокупности уравнений оптимальным способом
(фильтр Калмана или рекуррентный МНК с частично целочисленным вектором
состояния) является слишком ресурсоёмкой задачей. Во избежание этого
необходимо отбраковать аномальные измерения перед ресурсоёмкими
задачами.
Рассматривается ряд вариаций блоков «Критерий согласованности
измерений», «Поиск и отбраковка аномальных измерений», «Уточнение
вектора состояния».
Рассмотрено несколько стратегий поиска аномального измерения.
• Ищем максимальную по абсолютной величине невязку. Соответствующее
измерение считаем аномальным.
• Ищем максимальную по абсолютной величине взвешенную невязку.
Соответствующее измерение считаем аномальным.
• Ищем такое измерение, при удалении которого взвешенная сумма
квадратов невязок, взятых на обновлённом решении, примет наименьшее
значение. Этот способ назван перебором.
Далее описываются следующие отбраковщики: по первым разностям кодовых
измерений, по первым разностям однозначных фазовых измерений, по
приращениям первых разностей полных фаз. Относительно рассмотренных
отбраковщиков делаются следующий выводы:
1. Все рассмотренные выше отбраковщики аномалий требуют решения
задачи позиционирования. С другой стороны задача позиционирования не
будет полноценной без отбраковки аномалий. Поэтому задача
позиционирования и задача отбраковки аномалий составляют единое целое.
2. Все отбраковщики аномалий сводятся к единой схеме, которая
позволяет заменять некоторые свои функциональные блоки без изменения
оставшихся. На основании этих замен можно строить различные стратегии
принятия решения о наличии аномалий, поиска и отбраковки аномалий,
обновления вектора состояния задачи позиционирования. В дальнейшем это
позволит выбрать оптимальную комбинацию стратегий, варьируя указанные
три.
Далее производится оценка ресурсоёмкости задач, на основании чего
делается вывод о необходимости разделения решения задачи на два процесса.
Целью первого процесса является определение неоднозначностей и позиции на
15моменты получения оценок неоднозначностей. Целью второго – продление
позиции на основании данных первого процесса.
В связи с этим разделением возникают следующие режимы работы с
измерениями базы:
• Режим экстраполяции. Данный режим предполагает наличие следящей
системы за измерениями базы, которая прогнозирует измерения базы на
требуемый момент времени. При этом возникают ошибки экстраполяции.
• Режим задержки. В этом режиме нет ошибок экстраполяции, но
возникают динамические ошибки, связанные с запаздыванием решения
по отношению к текущему моменту. Этот режим можно использовать
при позиционировании в случае постоянства позиции ровера, то есть при
статике ровера.
Четвёртая глава посвящена алгоритмам задачи ВПРВ. Сначала
приводятся основные методы при решении задачи. Описаны линейные
стохастические модели наблюдения вида
y = Hx + ζ y , (5)
где y ∈ M m×1 ( \) – вектор наблюдений, H ∈ M m×n ( \ ) – матрица модели,
ζ y ∈ M m×1 ( \ ) – вектор шумов, x ∈ M n×1 ( \ ) – вектор оцениваемых параметров, m
– число измерений, n – число оцениваемых параметров. Причём вектор шумов
ζ y имеет нормальное распределение с нулевым математическим ожиданием и
ковариационной матрицей R y = cov[ζ y ] . Описан переход к эквивалентной модели
с нормированными шумами вида
y = Hx + ζ y , (6)
где y := T ⋅ y, H := T ⋅ H, ζ y := T ⋅ ζ y , T – множитель Холецкого для весовой матрицы
W y = [R y ]−1 модели (5): W y = TT T . Доказывается равенство решений, полученных
с помощью МНК для моделей (5) и (6), т.е. эквивалентность моделей.
Описываются основные свойства модели (6). В частности, независимость
распределения вектора шумов ζ y относительно ортогональных преобразований.
Рассматриваются вычислительные модификации МНК для моделей (5) и (6).
Рассмотрен вариант обобщения этих вычислительных схем на нелинейный
случай.
Далее рассматриваются алгоритмы формирования вторых разностей для
задачи позиционирования. При позиционировании по кодам алгоритм
формирования вторых разностей осуществляется по следующей схеме:
(ρ ) f (ρ ) f (ρ ) f (ρ ) f (ρ ) f (ρ ) f ⎡Cτ( ,ρτ ) f Cτ( ρ,rG) f cτ( ρ ) f ⎤
[1 H cos |y ] ⎯⎯
T×
→[w H cos |y ] ⎯⎯
Q×
→⎢ ρ) f ρ) f ⎥
.
⎣ 0 H (DD y (DD ⎦
Поясним эту схему:
161. Сначала формируется расширенная матрица кодовой задачи для одного
диапазона частот одной спутниковой системы, где в левой части стоят
коэффициенты при переменных, отвечающим уходу часов и координатам,
в правой части стоит вектор отклонений измерений относительно
расчётных значений дальностей. Столбец коэффициентов (единичный
столбец) при переменной, отвечающей уходу часов, ставится на первое
место.
2. Производится умножение матрицы, сформированной на шаге 1 на
матрицу корней из весов T . Получаем модель с нормированными
шумами.
3. Производится специальное ортогональное преобразование,
представляющее собой отражение Хаусхолдера, обнуляющее элементы
первого столбца, кроме первого.
ρ) f ρ) f
4. Матрицы H (DD , y (DD характеризуют измерения, в которых отсутствует
влияние ухода часов, т.е. измерения, являющиеся аналогом вторых
разностей для кодовых измерений.
Для однозначных фаз ГЛОНАСС требуется немного иной подход из-за
различных длин волн по различным спутникам. Такой подход показан на схеме
⎡Cτ( ,ρτ ) f 0 Cτ( ρ,rG) f cτ( ρ ) f ⎤
[1(ϕ ) f λ (ϕ ) f H cos
(ϕ ) f
| y (ϕ ) f ] ⎯⎯
T×
→ ⎢ (ϕ ) f ⎥ ⎯Q⎯ ×
→
⎣w λ (ϕ ) f H (cos ϕ) f
y (ϕ ) f ⎦
⎡Cτ(ϕ,τ ) f Cτ(ϕ,Δ)ψf Cτ(ϕ,rG) f cτ(ϕ ) f ⎤
⎢ ⎥
⎯⎯ Q×
→⎢ 0 CΔ(ϕψ),fΔψ C(Δϕψ) ,frG cΔ(ϕψ) f ⎥
⎢⎣ 0 0 ϕ) f
H (DD ϕ) f ⎥
y (DD ⎦
Поясним эту схему:
1. Формируется расширенная матрица для фаз задачи одного диапазона
ГЛОНАСС.
2. Производится умножение матрицы, сформированной на шаге 1 на
матрицу корней из весов T . Дополняем эту матрицу строкой, полученной
для кодовых измерений данного диапазона ГЛОНАСС.
3. Производятся два отражения Хаусхолдера, обнуляющее элементы
первого и второго столбца.
ϕ) f ϕ) f
4. Матрицы H (DD , y (DD характеризуют измерения, в которых отсутствует
влияние ухода часов и начальной фазы, т.е. измерения, являющиеся
аналогом вторых разностей для фаз.
Предложенный алгоритм позволяет сократить на порядок (относительно
числа измерений) число операций по сравнению с традиционным подходом,
который требует формирования ковариационной матрицы, нахождения
обратной к ней весовой матрицы и ряда других матричных операций.
17Само позиционирование рекомендуется осуществлять по схеме
нормальных уравнений. Для этого формируем матрицы
ˆ := ∑ [H f ]T [H f ], dˆ := ∑ [H f ]T [ y f ] ,
D
f f
где H f , y f – построенные выше матрицы либо для кодов, либо для фаз, сумма
ведётся по всем системам и диапазонам частот. Оценка вектора поправки к
координатам равна
xˆ := Dˆ −1 ⋅ dˆ .
Матрица Pˆ = Dˆ −1 является ковариационной матрицей вектора оценок координат.
Матрица D̂ называется информационной матрицей.
Для поиска и исключения аномальных измерений разработан алгоритм
быстрого перебора. Алгоритм основан на полученной в работе рекуррентной
связи между взвешенными суммами квадратов невязок при отбраковке i -го
уравнения
2 2
δy (i ) (xˆ (i ) ) = δy (xˆ ) − c(i ) ([ y ]i − h(i ) xˆ ) 2
где вектор w (i ) , коэффициент c(i ) вычисляются с учётом геометрии задачи, h(i )
представляет собой строку коэффициентов i -го уравнения. Аномальным
измерением по критерию быстрого перебора является измерение, для которого
величина c(i ) ([y ]i − h(i ) xˆ )2 , представляющая собой квадрат невязки с
коэффициентом, принимает максимальное значение. При отбраковке
аномального измерения пересчёт решения и его ковариационной матрицы
следует осуществлять по полученным в работе формулам
xˆ ( i ) = xˆ − c( i ) w ( i ) ([ y ]i − h ( i ) xˆ ), Pˆ ( i ) = Pˆ + c( i ) w ( i ) w ( i )T .
Предложенный алгоритм быстрого перебора позволяет сократить на порядок
(относительно числа измерений) число операций по сравнению с перебором
измерений «в лоб». Если аномалий несколько, то алгоритм быстрого перебора
осуществляющий на рисунке 5 блок «поиск и отбраковка аномалий»
применяется несколько раз.
Далее в диссертации рассматриваются алгоритмы задачи определения
неоднозначностей. Предлагается совместно фильтровать вторые разности
неоднозначностей и координаты. Фильтрация осуществляется согласно
вычислительной схеме метода Калмановской фильтрации, в которой первично
оцениваются информационная матрица Холецкого Sˆ k (т.е. множитель
Холецкого для информационной матрицы) и информационный вектор
Холецкого sˆ k = Sˆ k ⋅ xˆ k , где xˆ k – вектор неизвестных. Оценка искомого вектора
неизвестных равна xˆ k = [Sˆ k ]−1 ⋅ sˆ k .
18В качестве модели динамики для неоднозначностей предложена схема
«старения», для координат в зависимости от априорной информации о
движении ровера предлагается использовать либо независимую динамику, либо
статику. Обновление фильтра осуществляется с помощью комбинаций
измерений, аналогичным вторым разностям. Для кодовых измерений
используются те же комбинации, что и при позиционировании. Для фазовых
измерений предложена схема, отличающаяся от схемы для позиционирования
тем, что добавляется блок коэффициентов соответствующий вторым разностям
неоднозначностей. Для оптимизации схемы обновления фильтра предлагается
отдельно преобразовать все кодовые измерения к упрощённой форме. После
этого составляется совокупная матрица измерений и производится обновление
компонент фильтра.
При фильтрации вторых разностей неоднозначностей могут происходить
следующие изменения в созвездии
• смена опорного спутника
• появление/исчезновение не опорного спутника
• исчезновение опорного спутника (сводится комбинации первых двух)
Для того, чтобы сохранить накопленную информацию при смене
опорного спутника производятся специальные замены переменных для вторых
разностей неоднозначностей вида
∇ s ,r N f = ∇ s , j N f − ∇ r , j N f ,
где s, r , j соответствуют не опорному спутнику, старому опорному спутнику и
новому опорному спутнику. В соответствии с этими заменами
пересчитываются информационная матрица Холецкого и информационный
вектор Холецкого. Для их быстрого пересчёта разработаны специальные
алгоритмы. Также разработаны алгоритмы быстрого пересчёта для случая
появления/исчезновения не опорного спутника. Предложенные алгоритмы
позволяют сократить число операций с плавающей точкой на порядок
относительно числа фильтруемых неоднозначностей.
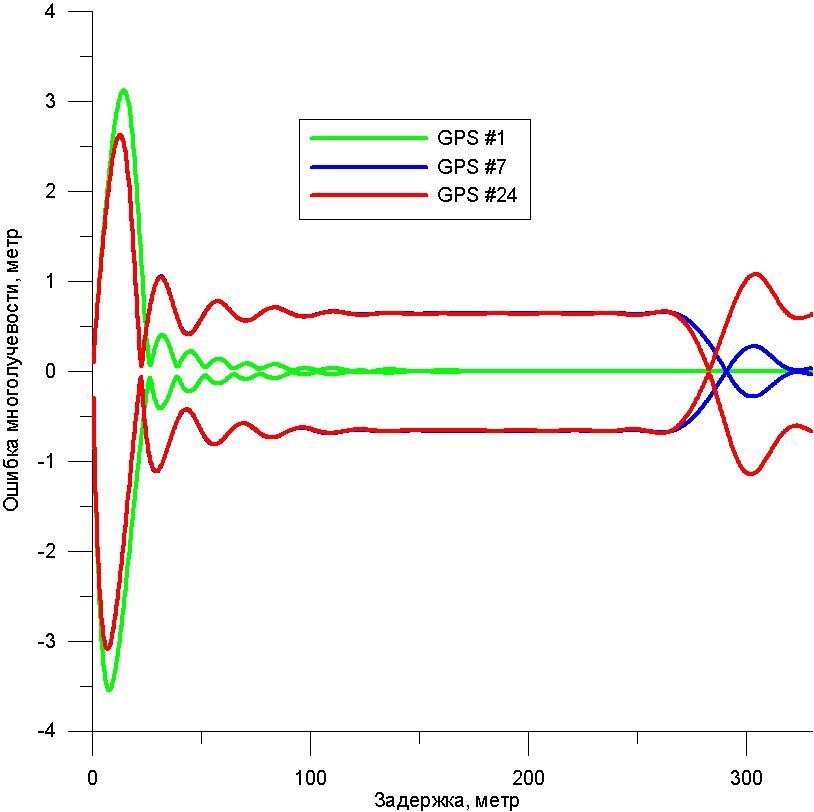
Пятая глава посвящена анализу экспериментальных данных.
Разработанная методика использована для анализа влияния на ошибки кодовой
многолучёвости различных кодов GPS. Расчётные значения огибающих
кодовой многолучёвости приведены на рисунке 6
197.00
6.00
m
GPS #1,#2,#3,#5 and etc.
error envelopes,
5.00 GPS #4,#6,#16,#19,#28
4.00
м.
GPS #8
многолучёвости,
3.00
GPS #24
2.00
1.00
0.00
-1.00
Code multipath
-2.00
-3.00
Ошибка
-4.00
-5.00
-6.00
-7.00
0.00 100.00 200.00 300.00 400.00 500.00 600.00
Multipath
Задержка distance,
отражённого m
сигнала, м.
Рис 6.
Анализ огибающих показывает наличие «аномальных» кодов, для которых
ошибка многолучёвости не затухает на расстоянии более 300 метров,
соответствующему одному элементу ПСП.
Произведено сравнение расчётных ошибок многолучёвости и ошибок
многолучёвости, полученных из полунатурного эксперимента. Под
полунатурным экспериментом понимается использование симулятора GPS-
сигналов, который генерирует многолучёвый сигнал
6
5 calculated multipath envelope
4
многолучёвости, м.
3
2
errors, m
1
0
Code
-1
Ошибка
-2
-3
-4
-5
-6
0 100 200 300 400 500 600 700
Multipath
Задержка distance,
отражённого m
сигнала, м.
Рис. 7.
Экспериментальные ошибки многолучёвости и расчётные огибающие для них
для GPS#8 вынесены на рис 7. Анализ графиков показывает высокую степень
согласованности реальных данных и расчётных огибающих.
Далее производится анализ данных по задаче ВПРВ. Разработанные в
диссертации алгоритмы реализованы в экспериментальной программе RTK-E.
Данная программа была встроена в приёмник Hiper фирмы Topcon.
Тестирование проводилось на длительных интервалах времени. Во время
тестирования производилось прерывание поправок: поправки поступали на
20пятиминутных интервалах с паузами в 1 минуту. Продолжительность паузы
выбиралась таким образом, чтобы задача «сбросилась» в обоих приёмниках.
Характерные результаты сравнительного тестирования приёмника Hyper с
приёмником фирмы Sokkia приведены в таблице 1, где показаны основные
статистические результаты. Некоторые столбцы нуждаются в пояснении. Под
«высокоточными решениями» понимаются решения, которые приёмник
маркирует как высокоточные. То есть в столбец «Доля высокоточных решений»
включаются также и выбросы. Доля выбросов считается относительно всех
высокоточных решений. Среднеквадратические отклонения (СКО)
вычислялись по высокоточным решениям без выбросов.
Доля
Интер- Доля
высоко- Число СКО СКО СКО
вал Число выбро-
точных выбро- Север Запад Высота Версия
обработ- файлов сов,
решений, сов [mm] [mm] [mm]
ки %
%
29/03/10
- 428 94.85 254 0.21 7.1 6.9 21.2 RTK-E
31/03/10
29/03/10
- 441 90.09 2894 2.50 11.2 8.6 24.9 Sokkia
31/03/10
Таблица 1. Результаты тестирования при подаче/перерывах поправок 5 мин/1
мин, время экстраполяции – 10 секунд.
На основании статистических данных по таблицам сделаны следующие
выводы:
1. Доля высокоточных решений у RTK-E выше, чем у Sokkia почти на
всех интервалах.
2. Доля и число выбросов у RTK-E существенно ниже, чем у Sokkia.
3. СКО по плановым координатам и по высоте у RTK-E меньше, чем у
Sokkia
Далее в работе приводятся графики вероятности получить фиксированное
решение за заданное время. На рисунке 8 представлен характерный вид
графиков.
21100%
80%
60%
P
RTK3
40%
Sokkia
20%
0%
0 50 100 150 200 250 300
T [сек]
Рис 8. Вероятность получения высокоточного решения по истечении заданного
времени для Sokkia и RTK-E.
Из рассмотрения графиков в работе сделан следующий вывод: в целом
вероятность получить фиксированное решение в RTK-E выше, чем в приёмнике
Sokkia.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
1. Разработана методика анализа кодовых и фазовых измерений, при
которой аналоговый тракт характеризуется комплексной частотной
характеристикой результирующего фильтра. Удобно использовать импульсную
характеристику низкочастотного эквивалента результирующего фильтра. Эта
характеристика является комплексной.
2. Получены выражения для расчёта корреляционных компонент для
различных входных (в том числе новых) сигналов с учётом структуры кодовой
последовательности. В качестве входных сигналов, в частности, используются
BSPK- и BOC- сигналы. Целесообразно сначала рассчитывать корреляционные
компоненты без учёта аналогового тракта, после чего осуществить свёртку с
импульсной характеристикой низкочастотного эквивалентного фильтра.
3. Получены выражения для расчёта ошибок кодовой многолучевости и
их огибающих, в которых учтено взаимное влияние системы фазовой
автоподстройки и системы слежения за задержкой. Использование таких
22выражений даёт высокую степень согласованности расчётных огибающих с
экспериментальными данными.
4. Разработан алгоритм формирования комбинаций измерений GPS и
ГЛОНАСС, которые являются аналогом вторых разностей, для задачи
позиционирования и для задачи определения неоднозначностей. Использование
данных комбинаций позволяет сократить на порядок (относительно числа
измерений) число операций с плавающей точкой по сравнению с
традиционным подходом.
5. Разработана схема фильтрации вторых разностей неоднозначностей, в
которой фильтруется множитель Холецкого информационной матрицы и
вектор, представляющий собой произведение этого множителя на вектор
состояния. Указанная схема является наиболее вычислительно устойчивой.
Специально для этой схемы разработаны алгоритмы учёта изменений в
созвездии наблюдаемых спутников. Эта вычислительная схема также позволяет
сократить число операций при передаче данных из задачи фильтрации
неоднозначностей в задачу целочисленного разрешения.
6. Все разработанные алгоритмы реализованы в программных продуктах
фирмы «Topcon» и показали свою работоспособность и эффективность.
ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ
1. D. Milyutin, A. Veitsel, M. Vorobiev, M. Zhodzishsky. Impact of
Pseudorandom Noise Codes on Multipath Mitigation. ION-2005.
2. Вейцель А.В., Жодзишский М.И., Милютин Д.С. Ошибки
многолучевости для различных спутниковых сигналов. Информационно-
измерительные и управляющие системы, №8, 2009.
3. Милютин Д.С., Вейцель А.В., Никитин Д.П. Повышение точности
местоположения с использованием новых сигналов спутниковых
навигационных систем. М.: Вестник МАИ, №7, 2009.
4. US 61261772. D.Milyutin, A.Plenkin. Detection and Correction of
Anomalous Measurements in a Global Navigation Satellite System Receiver.
5. Аппаратура высокоточного позиционирования по сигналам глобальных
навигационных спутниковых систем: приёмники-потребители навигационной
информации / Жодзишский М.И. и др.; гл. 21 и 23; под ред. Жодзишского М.И.
– М.: МАИ, 2010. – кн. 1.
23Вы также можете почитать