СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО РОБОТА В СРЕДЕ С ДИНАМИЧЕСКИМИ ПРЕПЯТСТВИЯМИ THE MOTION CONTROL SYSTEM OF THE MOBILE ROBOT IN ENVIRONMENT ...
←
→
Транскрипция содержимого страницы
Если ваш браузер не отображает страницу правильно, пожалуйста, читайте содержимое страницы ниже
Научно-технические ведомости СПбГПУ 5' (181) 2013
Информатика. Телекоммуникации. Управление
УДК 62-503.57
В.Н. Герасимов
Система управления движением мобильного робота
в среде с динамическими препятствиями
V.N. Gerasimov
The motion control system of the mobile robot
in environment with dynamic obstacles
Исследованы два метода управления движением мобильного робота в составе навигационной
системы: метод эффективного пути и метод динамического окна. Проведено моделирование и по-
лучены зависимости результатов работы методов от различных параметров. Предложен алгоритм
определения параметров движения динамических препятствий по данным лазерного дальномера.
Мобильный робот. подвижные препятствия. управление роботом. лазер-
ный дальномер.
In the paper two methods of mobile robot motion control are investigated in composition of navigation
system: effective path method and dynamic window method. A simulation was performed and dependencies
of methods results from various parameters are obtained. The algorithm to determine the parameters of
motion from laser rangefinder is offered.
Mobile robot. moving obstacles. robot control. laser rangefinder.
Задача автоматического управления мо- Решение поставленной задачи обычно
бильным роботом в среде, содержащей под- разделяют на два этапа: поиск оптимально-
вижные препятствия, в настоящее время го маршрута по карте и следование вдоль
является актуальной. В статье рассматри- полученного маршрута. Существует мно-
ваются и анализируются методы ее реше- жество алгоритмов поиска оптимального
ния. Задача ставится следующим образом. маршрута, в нашем исследовании будет
Мобильный робот, оснащенный сканирую- применяться наиболее широко распростра-
щим лазерным дальномером, находится в ненный – А* (А-звезда). Этот алгоритм до-
помещении. Известна карта данного по- статочно хорошо изучен, поэтому в данной
мещения, построенная при помощи алго- статье не будем его подробно рассматри-
ритма SLAM. Приводной уровень системы вать.
управления робота выполняет задание век- Задача следования вдоль маршрута име-
тора скорости (v, ω)T. Необходимо, управ- ет несколько подходов к решению, взятых
ляя вектором скорости, провести робот до из теории автоматического управления. Су-
заданной целевой точки, избегая столкно- ществуют различные системы управления,
вения с препятствиями (неподвижными и построенные на разных принципах:
подвижными). 1) СУ с линейными регуляторами;
Существует много способов решения 2) оптимальное управление;
данной задачи, поэтому целью исследова- 3) нечетко-логический контроллер;
ния является выбор наиболее эффективных 4) нейросетевой контроллер.
методов: универсальных, надежных, про- Рассмотрим подробнее два первых ва-
стых в реализации; затем – проведение мо- рианта. В первом случае задача сводится
делирования и, наконец, их сравнение по к расчету опорной точки – положению на
результатам моделирования. плоскости, к которому должен стремить-
94Экстремальная робототехника
ся робот, а также реализации внешнего необходимо экстраполировать траекторию
контура управления приводного уровня движения как препятствий, так и робота.
робота, отрабатывающего заданное поло- В обозначенной статье данный алгоритм
жение на плоскости. Одним из наиболее описан подробно, здесь же укажем только
успешных методов вычисления опорной ключевой момент: если при экстраполяции
точки является метод эффективного пути траектории пересекаются, то необходимо
[1]. Суть метода заключается в следующем. еще раз выполнить планирование маршру-
В качестве номинальной опорной точ- та на карте с новыми препятствиями, рас-
ки принимается второй излом кусочно- положенными в точках пересечения траек-
линейной траектории. Это предположение торий, а также сдвинуть опорную точку в
основано на факте, что обнаружение пер- зону, свободную от столкновений.
вого изменения направления траектории, Теперь, имея представление о реали-
которое дало бы опорную точку с дискрет- зации метода эффективного пути, можно
ным шагом в 45° относительно положения провести моделирование. В ходе моделиро-
робота, недостаточно для того, чтобы опре- вания проверялись следующие характери-
делить тенденцию дальнейшего изменения стики методов эффективного пути (ориги-
траектории. Кроме того, вводятся ограниче- нального и модифицированного для учета
ния на длину вектора эффективного пути: динамических препятствий):
сверху с учетом максимально возможного Lpath – длина пройденного роботом
времени беспрепятственного движения и пути;
снизу, учитывая минимальный тормозной Tpath – время от начала движения до до-
путь. Таким образом, длина эффективного стижения роботом целевой точки;
пути адаптивно увеличивается при повы- Dmax – максимальное отклонение траек-
шении скорости робота, и наоборот. тории робота от спланированного марш-
Перейдем к системе управления с ли- рута;
нейными регуляторами. Ее особенность траектория робота (для визуальной
заключается в том, что она содержит два оценки).
параллельных контура слежения: курс на При этом были получены зависимости
опорную точку и расстояние до нее, при- этих характеристик от параметров мето-
чем управление в контуре расстояния зави- дов (максимально допустимые скорости и
сит от сигнала рассогласования в контуре ускорения, коэффициенты регуляторов в
курса. Такой подход объясняется тем, что контуре управления и т. п.) и количества
движение к цели имеет смысл только тогда, препятствий.
когда курс робота близок к курсу на опор- Для сравнения метода с учетом под-
ную точку. При этом, чем меньше ошибка, вижных препятствий и без него проведено
тем выше скорость перемещения. моделирование с различным числом пре-
Предложенный выше вариант управле- пятствий от нуля до десяти. На рис. 1 а, б
ния мобильным роботом позволяет дви- представлены зависимости интересующих
гаться в среде с подвижными препятстви- нас характеристик от числа препятствий и
ями, рассматривая их как статические в траектории движения робота для каждого
каждый отдельный момент времени. Од- случая без учета подвижных препятствий.
нако оригинальный метод эффективного Как можно заметить, при увеличении чис-
пути не предполагает учет подвижных пре- ла препятствий растет время достижения
пятствий и, следовательно, не гарантирует цели, длина пройденного пути. Результаты
эффективное маневрирование в динамиче- работы алгоритма, использующего метод
ской среде без столкновений. Поэтому он эффективного пути с учетом подвижных
был модифицирован так, чтобы изменять препятствий, рассмотрим на рис. 1 в, г. Ви-
положение опорной точки в зависимости зуально оценивая полученные траектории,
от наличия препятствий и параметров их уже можно сделать вывод об эффективно-
движения [2]. Очевидно, что для определе- сти данного метода в отличие от предыду-
ния опорной точки в динамической среде щего, однако, примем к сведению объек-
95Научно-технические ведомости СПбГПУ 5' (181) 2013
Информатика. Телекоммуникации. Управление
а) б)
в) г)
Рис. 1. Результаты моделирования метода эффективного пути
тивную оценку и обратимся к графикам. V r = V s ∩ Va ∩ Vd ,
В данном случае длина пройденного пути
практически постоянна, время достижения где Vs – допустимые скорости, ограниче-
ны [0, vmax], [–ωmax, ωmax]; Va – безопасные
цели увеличивается незначительно с ростом
скорости (движение с ними не приводит к
числа препятствий, а также отклонение от
столкновению); Vd – динамические ограни-
траектории намного меньше, чем в преды-
чения (по ускорениям).
дущем случае.
Этот метод позволяет непосредствен-
Итак, проведя моделирование, можно
но учесть динамику мобильного робота. В
сделать вывод о работоспособности метода.
основе решения лежит поиск экстремума
Также подтверждается, что модификация
функционала в динамическом окне:
для учета подвижных препятствий повыси-
ла его надежность и эффективность. (v * ω*)T = arg extr(G (v, ω)),
Перейдем к методам оптимального где G(v, ω) – критерий оптимальности –
управления. Одна из наиболее успешных функционал, учитывающий степень совпа-
реализаций – это универсальный метод дения траектории робота со спланирован-
динамического окна [3], суть которого за- ным маршрутом, а также расположение и
ключается в выборе оптимального вектора траектории движения препятствий.
скорости из допустимой области простран- В оригинальной статье предлагается
ства скоростей, которая получила название максимизировать функционал следующего
«динамическое окно»: вида:
96Экстремальная робототехника
G (v, ω) = σ(α heading(v, ω) + Для учета подвижных препятствий,
траектории, которые приводят к столкно-
+β dist(v, ω) + γ velocity(v, ω)),
вению, убираются из пространства допу-
где heading(v, ω) – функционал курса на стимых скоростей, однако необходимо пе-
целевую точку; dist(v, ω) – функционал репланировать маршрут с препятствиями в
расстояния до ближайшего препятствия; новых местах.
velocity(v, ω) – функционал скорости дви- Для проверки работоспособности про-
жения робота; α, β, γ – весовые коэффици- ведено моделирование (рис. 2). Из рисунка
енты; σ – нормирующий коэффициент. видно, что не все эксперименты заверши-
В работе [4] метод динамического окна лись успешно (рис. 2 а, б). В случае с до-
скомбинирован с методом эффективного пущением статичности, в основном, из-за
пути и предложен комплексный критерий, достаточно большого отклонения от спла-
учитывающий близость реальной траекто- нированного маршрута. Во втором случае
рии робота к вектору эффективного пути, а (рис. 2 в, г) ошибки реже, но имеются. Как
также расстояние до препятствия: показали исследования, столкновение про-
исходит, когда пространство допустимых
G (v, ω) = λϑclear + (1 − λ)ϑpath ,
скоростей становится пустым, т. е. нет тра-
где ϑclear – функционал длины пути, сво- ектории, двигаясь вдоль которой можно из-
бодного от препятствий; ϑpath – функцио- бежать столкновения.
нал близости траектории; λ – весовой ко- Итак, метод динамического окна также
эффициент. является работоспособным, однако менее
а) б)
в) г)
Рис. 2. Результаты моделирования метода динамического окна
97Научно-технические ведомости СПбГПУ 5' (181) 2013
Информатика. Телекоммуникации. Управление
надежным, с необходимостью доработки. таким образом, чтобы охватывать все точки
Преимущество данного метода в его универ- на скане, описывающие данный объект;
сальности: можно задать критерий оптималь- 3) курс движения препятствия (угол по-
ности движения, необходимый для конкрет- ворота относительно абсолютной системы
ной задачи. Это может быть минимальное координат) определяется направлением
время, кратчайший путь, минимальное от- вектора его линейной скорости;
клонение от спланированного маршрута, 4) если скорость перемещения препят-
минимальные энергозатраты и т. п. ствия невелика по сравнению с максималь-
Сравним оба метода по результатам мо- ной скоростью мобильного робота, будем
делирования. Метод динамического окна считать его статическим в каждый момент
показал себя менее надежным, зато робот времени, т. к. алгоритм обхода статических
достигает цели за более короткое время. препятствий допускает медленные измене-
Еще один недостаток метода динамическо- ния расположения препятствий.
го окна – вычислительная сложность. Итак, учитывая эти ограничения, необ-
Перейдем к задаче определения пара- ходимо, имея карту помещения, текущий
метров движения препятствий. Эта задача скан и собственное положение робота,
сложная, имеющая множество способов ре- найти следующие параметры каждого под-
шения в зависимости от типа сенсора, типа вижного препятствия:
входных данных, априорной информации •• диаметр габаритной окружности W;
об объекте и т. п. В нашем случае в качестве •• координаты центра этой окружности
сенсора используется лазерный дальномер с (x, y);
угловым разрешением 1° и разрешением по •• курс φ;
дальности 10 мм. Входными данными яв- •• вектор скорости (v, ω)T.
ляется массив точек, описывающий рельеф Для решения поставленной задачи
помещения в плоскости измерения. В каче- предлагается использовать следующий ал-
стве априорной информации имеется карта горитм:
помещения, построенная с помощью алго- 1. Проинициализировать список под-
ритма NDT (Normal Distributions Transform – вижных объектов.
преобразование нормальных распределе- 2. Ждать новый скан.
ний) [5]. Также алгоритм SLAM дает теку- 3. Из всех точек скана найти такие, ко-
щее положение мобильного робота в систе- торые не попадают на объекты на NDT-
ме координат, связанной с помещением, и карте.
оценку скорости движения робота. 4. Провести кластеризацию этих точек,
В результате решения данной задачи не- составить список кластеров.
обходимо получить список подвижных объ- 5. Выявить изолированные точки и уда-
ектов со следующими параметрами: лить их.
текущее положение; 6. Для каждого объекта из списка кла-
текущий вектор скорости; стеров:
геометрические размеры объекта. 7. Определить диаметр габаритной
Рассмотрим ограничения, которые по- окружности и ее центр.
зволят значительно упростить решение дан- 8. Из списка объектов найти наиболее
ной задачи, но при этом решение должно близкий по положению и размеру.
успешно применяться в ранее изложенном 9. Если окружности объекта и кластера
алгоритме обхода подвижных препятствий: не пересекаются, создать новый объект и
1) все препятствия типа «мобильный добавить его в список.
робот», т. е. подчиняются уравнениям дви- 10. В противном случае обновить оцен-
жения трехколесного мобильного робота ку скорости и курса по новому положению
и достаточно инерционные, т. е. не могут объекта.
скачкообразно изменить скорость; 11. Продолжить цикл по кластерам, пе-
2) размеры объекта определяются диаме- рейти к п. 5.
тром габаритной окружности, построенной 12. Перейти к п. 2.
98Экстремальная робототехника
Рассмотрим подробнее основные пункты 1) точка относится к подвижному пре-
предложенного алгоритма. Определение пятствию, если препятствие не перемеща-
точек скана, принадлежащих подвижным лось во время построения карты, а затем
препятствиям, проводится с использовани- начало движение;
ем NDT-карты, которая представляет собой 2) точка относится к неподвижному
функцию, являющуюся суммой функций препятствию, в противном случае.
нормального распределения точек скана Как видно, по значению функции нель-
в ячейках карты. Распределение в одной зя однозначно определить принадлежность
ячейке представляется следующим выраже- точки подвижному препятствию, однако,
нием: необходимо принять во внимание допу-
T −1 щения, сформулированные ранее, а имен-
1 ( x − µ) ∑ ( x − µ) но допущение 4. При небольшой скорости
p( x ) = exp − . (1) перемещения объекта и одновременном
2π ∑ 2
построении карты мы получим случай 3, и
учитывая данное допущение, отнесем точ-
На такой карте в местах, где находятся ку к неподвижному препятствию. В первых
статические препятствия, функция достига- двух случаях привязка точки к статическо-
ет локального максимума, при удалении от му препятствию менее вероятна, чем к под-
препятствий функция монотонно убывает до вижному, и связано это с неточностями и
нуля, а в ячейках, где отсутствуют препят- погрешностями измерений. Кроме того,
ствия, функция тождественно равна нулю. случайное определение статического пре-
Для проверки точек скана необходимо пятствия в качестве динамического добавит
определить значение выражения (1). Оче- вычислительную нагрузку, но в дальнейшем
видно, если результат равен нулю, то дан- алгоритм не будет его обрабатывать, оценив
ная точка не описывает статическое препят- скорость его перемещения, которая в идеа-
ствие, следовательно, если карта актуальна, ле равна нулю. Также если точка, неверно
она описывает подвижное препятствие, отнесенная к подвижному препятствию, бу-
т. к. другой альтернативы нет. Однако та- дет в своей окрестности единственной, не-
кая простая оценка не всегда эффективна. обходимо исключить ее из рассмотрения.
Существует корреляция между значением Подведя итог рассуждениям, можно сде-
функции и принадлежностью точки к под- лать следующий вывод: точка скана счита-
вижному препятствию, но прямой зависи- ется принадлежащей подвижному препят-
мости нет. Рассмотрим различные ситуа- ствию, если значение функции нормального
ции. распределения близко к нулю в данной точке.
1. Функция обращается в нуль в данной На практике необходимо задать некоторый
точке, следовательно: порог, который эмпирически определяется,
1) точка относится к подвижному пре- исходя из вероятности допустимого оши-
пятствию, если карта актуальна; бочного определения.
2) точка относится к неподвижному пре- Следующий важный этап обработки
пятствию, если есть неточность в карте. полученных точек – это кластеризация.
2. Функция близка к нулю, следова- Основная цель кластеризации – сгруппиро-
тельно: вать точки по некоторому признаку. Также
1) точка относится к подвижному пре- данный алгоритм позволяет выявить изо-
пятствию, если оно находится в непосред- лированные точки. Нам необходимо кла-
ственной близости от статического; стеризовать точки, принадлежащие одному
2) точка относится к неподвижному объекту. Имея только дальнометрический
препятствию из-за погрешности измерения скан, очевидным способом является клас-
в текущий момент или в момент построе- сификация по евклидовому расстоянию
ния карты. между соседними точками. Исходя из ха-
3. Функция близка к единице или равна рактеристик лазерного дальномера, при-
единице, следовательно: ближенно рассчитаем порог допустимо-
99Научно-технические ведомости СПбГПУ 5' (181) 2013
Информатика. Телекоммуникации. Управление
го расстояния между соседними точками. ρ2
Найдем расстояние между соседними точ- L= , R= L2 − ρ2 .
ρ −a
2 2
ками скана на объекте, находящемся в 3 м
от робота, учитывая угловое разрешение Положение точки C найдем, отложив на
лазерного дальномера в 1°, биссектрисе угла P1OPn расстояние L.
d max = L ⋅ ∆ϕ ≈ 3 ⋅ 0, 0175 ≈ 0, 05 м. Итак, получив положение подвижно-
го препятствия и его размер, необходимо
Данный порог следует считать исходным проверить, имеется ли похожий объект в
значением для эмпирического подбора, списке. Проверка проводится по двум кри-
т. к. характер принадлежности точек одно- териям:
му объекту вероятностный. •• расстояние между центрами объекта в
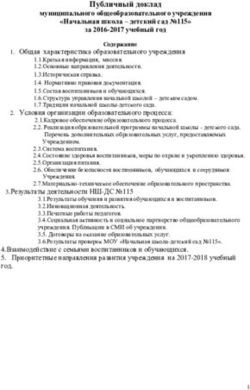
После получения кластеров точек на списке и проверяемого не должно превы-
следующем этапе необходимо определить шать некоторого порога, который опреде-
параметры габаритной окружности. На ляется максимальной скоростью движения
расчетной схеме (рис. 3) показаны точки препятствия и частотой получения сканов
скана, относящиеся к некоторому подвиж- от лазерного дальномера;
ному препятствию {Pi : i = 1, ..., n}, габа- •• габаритный размер объекта в списке
ритная окружность с центром в точке C и отличается от проверяемого не более, чем
радиусом R, которая описывает эти точки на заранее определенное значение.
и которую требуется найти. В точке O на- Если этим критериям удовлетворяют
ходится начало координат лазерного даль- несколько объектов в списке, выбирается
номера; ρ – расстояние до крайней точки наиболее близкий по расстоянию и разме-
скана; L – расстояние до центра C габарит- ру. Кроме того, при этом можно исполь-
ной окружности; a – половина расстояния зовать предсказание положения объекта из
между крайними точками скана P1 и Pn. списка, если имеется оценка его скорости
Расчет основан на том факте, что види- и курса.
мая дуга окружности на концах касается ли- Для использования в данном алгоритме
нии луча лазерного дальномера. Обозначим предлагается упрощенный вариант оценки
угол обзора объекта из точки O как 2β. Тогда скорости, т. к. много вычислительных ре-
половина этого угла равна углу между ра- сурсов используется для решения рассмо-
диусом CP1 и хордой, соединяющей крайние тренных выше проблем. Сначала определя-
точки P1Pn. Выражая неизвестные параметры ем разность положений нового объекта и
через измеренные, получим выражения для старого, затем, зная период измерений h,
расчета расстояния до центра габаритной находим грубую оценку скоростей по двум
окружности объекта, а также ее радиуса: координатам:
Рис. 3. Расчетная схема определения параметров габаритной окружности
100Экстремальная робототехника
xi − xi −1 y − yi −1 Итак, получены все необходимые па-
xi = , yi = i .
h h раметры подвижных объектов для метода
управления мобильным роботом в среде
Учитывая инерционность препятствия,
с подвижными препятствиями. Однако у
что было допущено при постановке задачи,
данного алгоритма есть существенные не-
к грубой оценке скорости применим ФНЧ
достатки, связанные с ограничениями по
(фильтр нижних частот) для снижения
типу подвижных препятствий, их форме,
шума дискретного аналога дифференциро-
модели движения. Несмотря на эти недо-
вания, используя следующие рекуррентные
статки, предложенный алгоритм позволяет
выражения:
поставить эксперимент на реальном роботе
x i = λ x i −1 + (1 − λ)x , y = λ y + (1 − λ) y ,
i i i −1 i в реальном помещении для оценки работо-
способности метода управления движением
где xi , yi – текущие измеренные скоро-
мобильного робота в динамической среде.
сти перемещения по каждой координате;
x, y – фильтрованные оценки скорости;
Таким образом, при исследовании ме-
λ ∈ (0;1) – характеристика фильтра, опре-
тодов управления движением были получе-
деляющая частоту среза.
ны следующие результаты.
Теперь, подставляя в стандартные урав-
Метод эффективного пути работоспо-
нения кинематики трехколесного мобиль-
собен и надежен, прост в реализации, не
ного робота полученные оценки вместо
требователен к вычислительным ресурсам,
x, y, получим следующие выражения для
но не является универсальным.
расчета оценки текущего вектора скорости
Метод динамического окна также рабо-
(v i , ω
i )T :
тоспособен, менее надежен (в текущей реа-
2 2 y лизации), требует больше вычислительных
v i = x i + y i , ϕi = arctg i ,
x i ресурсов, но робот достигает цели за более
короткий промежуток времени в среде с
ϕi − ϕi −1 бόльшим количеством подвижных препят-
ωi = .,
h ствий; также метод является универсальным
Из-за повторного дифференцирования в плане выбора критерия оптимальности.
при расчете ω необходимо также пропу- Предложен алгоритм определения па-
стить это значение через ФНЧ: раметров подвижных объектов по дально-
i = λ ω
i −1 + (1 − λ )ω . метрическому изображению и карте поме-
ω ω ω i щения.
СПИСОК ЛИТЕРАТУРЫ
1. Seder, M. Motion control of mobile robots collision avoidance [Text] / D. Fox, W. Burgard,
in indoor dynamic environments [Теxt] / M. Seder, S. Thrun // Robotics & Automation Magazine
I. Petrovic, K. Macek // Proc. of the Internat. Conf. IEEE. – 1997. – Т. 4. – P. 23–33.
on Electrical Drives and Power Electronics. – Du- 4. Seder, M. Dynamic window based approach
brovnik, Croatia, 2005. to mobile robot motion control in the presence of
2. Герасимов, В.Н. Решение задачи управле- moving obstacles [Text] / M. Seder, I. Petrovic //
ния движением мобильного робота при нали- Proc. of the 2007 IEEE Internat. Conf. on Robotics &
чии динамических препятствий [Текст] / В.Н. Automation. – 2007. – P. 1986–1991.
Герасимов, Б.Б. Михайлов // Вестник МГТУ 5. Biber, P. The normal distributions transform:
им. Н.Э. Баумана. Приборостроение. – 2012. a new approach to laser scan matching [Text] /
– С. 83–92. P. Biber, W. Strasser // Proc. of the 2003 IEEE/RSJ
3. Fox, D. The dynamic window approach to Internat. Conf. – 2003. – Т. 3. – P. 2743–2748.
References
1. Seder M., Petrovic I., Macek K. Motion control 2. Gerasimov V.N., Mikhailov B.B. Reshenie
of mobile robots in indoor dynamic environments / zadachi upravleniya dvizheniem mobilnogo robota
Proc. of the Internat. Conf. on Electrical Drives and pri nalichii dinamicheskih prepyatstviy [The solution
Power Electronics. – Dubrovnik, Croatia, 2005. of mobile robot motion control problem in presence
101Научно-технические ведомости СПбГПУ 5' (181) 2013
Информатика. Телекоммуникации. Управление
of dynamic obstacles] / Vestnik MGTU im. N.E. approach to mobile robot motion control in the
Baumana. Priborostroenie. – 2012. – S. 83–92. presence of moving obstacles / Proc. of the 2007
(rus) IEEE Internat. Conf. on Robotics & Automation.
3. Fox D., Burgard W., Thrun S. The dynamic – 2007. – P. 1986–1991.
window approach to collision avoidance / Robotics 5. Biber P., Strasser W. The normal distributions
& Automation Magazine IEEE. – 1997. – T. 4. transform: a new approach to laser scan matching
– P. 23–33. / Proc. of the 2003 IEEE/RSJ Internat. Conf. –
4. Seder M., Petrovic I. Dynamic window based 2003. – T. 3. – P. 2743–2748.
ГЕРАСИМОВ Владимир Николаевич – аспирант Московского государственного технического
университета имени Н.Э. Баумана.
105005, Россия, Москва, ул. 2-я Бауманская, д. 5.
E-mail: vovka_ok@list.ru
GERASIMOV Vladimir N. Bauman Moscow State Technical University.
105005, 2-ya Baumanskaya Str. 5, Moscow, Russia.
E-mail: vovka_ok@list.ru
СанктПетербургский государственный политехнический университет, 2013
102Вы также можете почитать