ЗАДАЧА ДВИЖЕНИЯ МОБИЛЬНОГО КОЛЕСНОГО РОБОТА - Автор работы: Пашинский И.О. ИУ4- 73 Руководитель: Юдин А.В.
←
→
Транскрипция содержимого страницы
Если ваш браузер не отображает страницу правильно, пожалуйста, читайте содержимое страницы ниже
Московский Государственный Технический Университет
им. Н.Э. Баумана
ЗАДАЧА ДВИЖЕНИЯ МОБИЛЬНОГО
КОЛЕСНОГО РОБОТА
Автор работы:
Пашинский И.О. ИУ4-73
Руководитель:
Юдин А.В.
Москва, 2013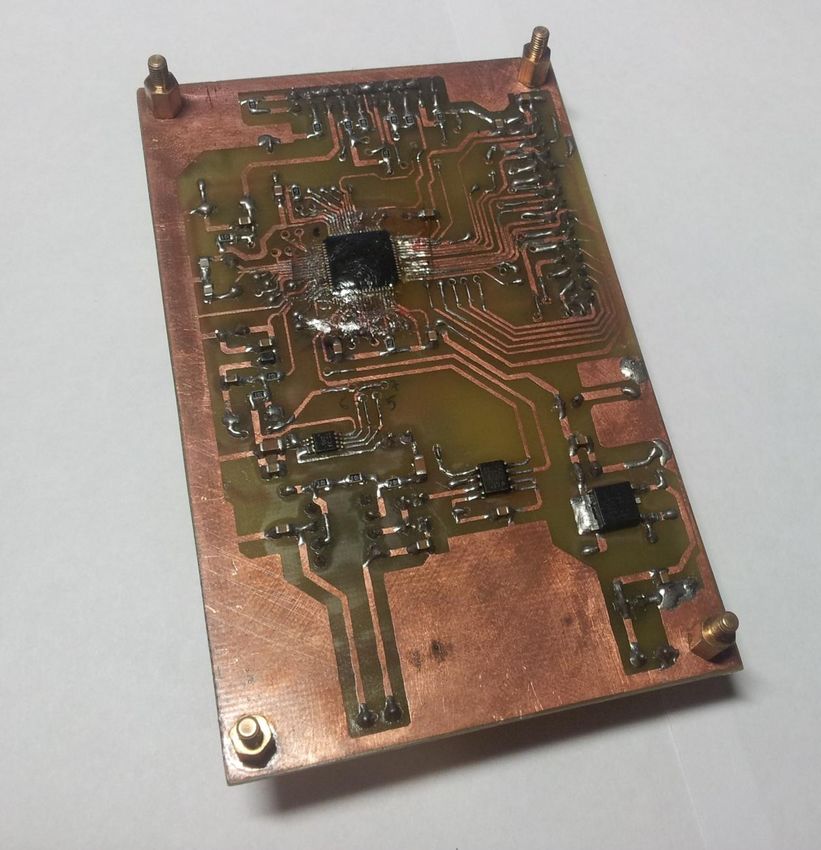
ПЛАН ДОКЛАДА
I. Введение
- описание предметной области
- актуальность задачи
II. Специфика объектов управления
- низкоуровневый объект управления – двигатель постоянного тока
- высокоуровневый объект управления – мобильный робот
III. Система управления движением робота
IV. Стенд для испытания электродвигателей
V. Функциональный генератор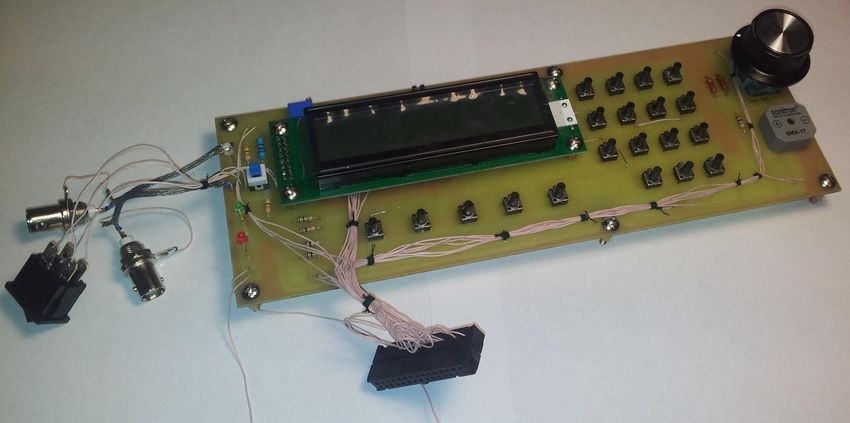
СУТЬ РАБОТЫ Предметная область работы - навигация по плоским поверхностям полигона (в т.ч. под небольшим углом к горизонту)

АКТУАЛЬНОСТЬ ЗАДАЧИ Опыт наблюдения соревнований показывает, что 2/3 и более команд не имеют развитой системы управления движением. Характер движения ограничен прямолинейными движениями и разворотами на месте. Ошибки движения компенсируются за счет дополнительных поправочных действий робота, что ведет к общей потере эффективности.
II. ОПИСАНИЕ ОБЪЕКТА УПРАВЛЕНИЯ
Наиболее часто применяемые электродвигатели:
Коллекторные электродвигатели постоянного тока с
возбуждением от постоянных магнитов
Напряжение питания: 9,12 В.
Мощность: до 20 Вт.
Частота вращения: до 9000 об/мин
Для работы на роботе двигатель снабжается
редуктором
ОПИСАНИЕ ОБЪЕКТА УПРАВЛЕНИЯ

III. СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТА Цель: создать интеллектуальную систему управления движением робота. Задачи: Разработка математического описания системы Разработка алгоритма работы системы и его программная реализация Изготовление системы Разработка ПО для ПК Проведение испытаний системы в работе, получение характеристик , диагностирование Внедрение системы в учебный процесс
ПОДХОД К СОЗДАНИЮ СИСТЕМЫ
1. Математическое описание
2. Создание алгоритма работы системы
3. Написание программного кода
4. Отладка программ в среде Proteus
5. Отладка программ на макетной плате
6. Проверка работы программ в реальных
условиях работы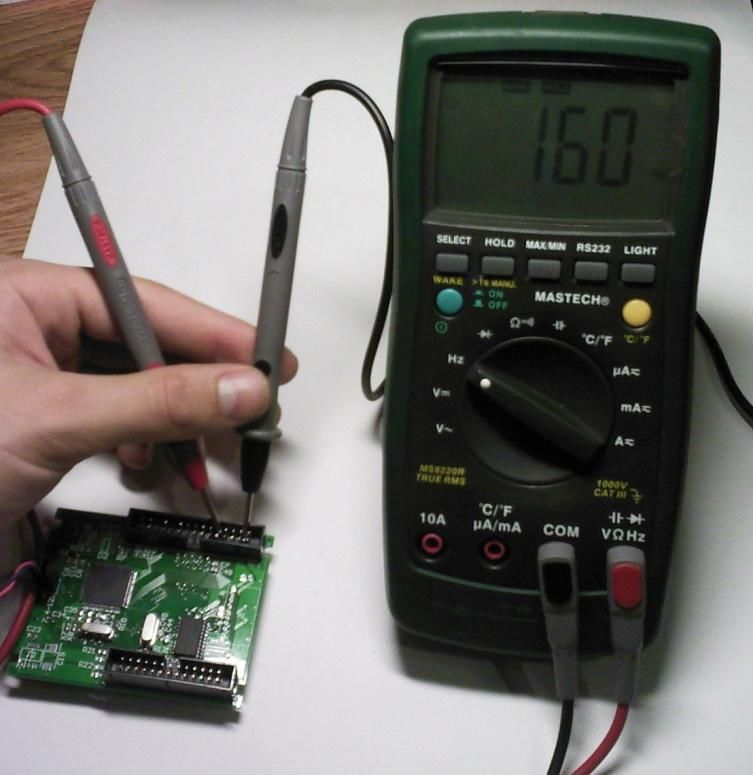
СТРУКТУРНАЯ СХЕМА СИСТЕМЫ
Структурная схема состоит, в основном, из трех больших блоков:
I. Вычислитель
II. Канал связи
III. САУМАТЕМАТИЧЕСКОЕ ОПИСАНИЕ АЛГОРИТМА
Математическая модель ПИД – регулятора
поправочный член
, новое значение параметраАЛГОРИТМ РАБОТЫ СИСТЕМЫ Структура алгоритма работы системы состоит из следующих блоков:
СЧИТЫВАНИЕ ИМПУЛЬСА С ДАТЧИКОВ
В качестве датчиков частоты вращения применены 3-х канальные
оптические энкодеры HEDS-5540.
Осциллограмма принятых импульсов (старт робота)
Алгоритм считывания импульса.
Подпрограмма считывает количество
импульсов, пришедших за постоянную
времени Т.
Исходя из максимальной и минимальной
скоростей движения робота, примем
постоянную времени равной 16мс.
Значение постоянной времени задается
временем между прерываниями по
переполнению таймера 2.АЛГОРИТМ ПИД-РЕГУЛЯТОРА
Основная программа Обработка прерывания
Установка нового значения частоты вращения
происходит по прерыванию таймер 2
(промежуток времени 16мс).УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ
Управление шаговыми двигателями происходит с помощью
драйвера шаговых двигателей M325.
Осциллограмма: период импульса Т = 0,006248с (160,05Гц)
T
Управление двигателями осуществляется с помощью программной ШИМ (скв. 50%).
Частота задается в отсчетах таймера 2.
Алгоритм программы:
Нет Да
Проверка значения частоты (160 Гц)КАНАЛ СВЯЗИ С ПК
Связь с ПК по протоколу RS-232 (преобразование уровней - MAX232)
Осциллограмма передачи данных на ПК.
Алгоритм работы
Часть основной программы Обработка прерыванияРАЗРАБОТАННОЕ ПО ДЛЯ ПК
Область задания параметров: константы
Область отображения
принятых данных регулятора, частоты вращения, частоты
стабилизации
Установка настроек СОМ порта Область отображения графиковРЕЗУЛЬТАТЫ ПРОВЕДЕННОЙ РАБОТЫ
Полученные характеристики:
Точность стабилизации скорости передвижения – 0,05 м/с
Диапазон регулирования частоты – 10-230 об/мин
В результате работы выполнено:
• Математическое описание
• Реализованы алгоритмы управления
• Разработано ПО для ПК
• Проведены первичные испытания
В дальнейшем планируется проверить работу системы в различных
скоростных режимах, при различной нагрузке. Усовершенствовать алгоритмы
регулирования и программное обеспечение для ПК. IV. СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ Цель: создать аппаратно-программный комплекс для комплексной отладки систем управления. Задачи: Разработка эскизного проекта Проведение расчетов на прочность и жесткость, выполнение чертежей Создание математической модели Изготовление стенда Разработка ПО для ПК Проведение испытаний комплекса в работе (на соревнованиях) Внедрение комплекса в учебный процесс Разработка методики обучения работе с САУ электропривода
ОБЩАЯ СТРУКТУРНАЯ СХЕМА КОМПЛЕКСА Общая структурная схема:
ОПИСАНИЕ СТЕНДА
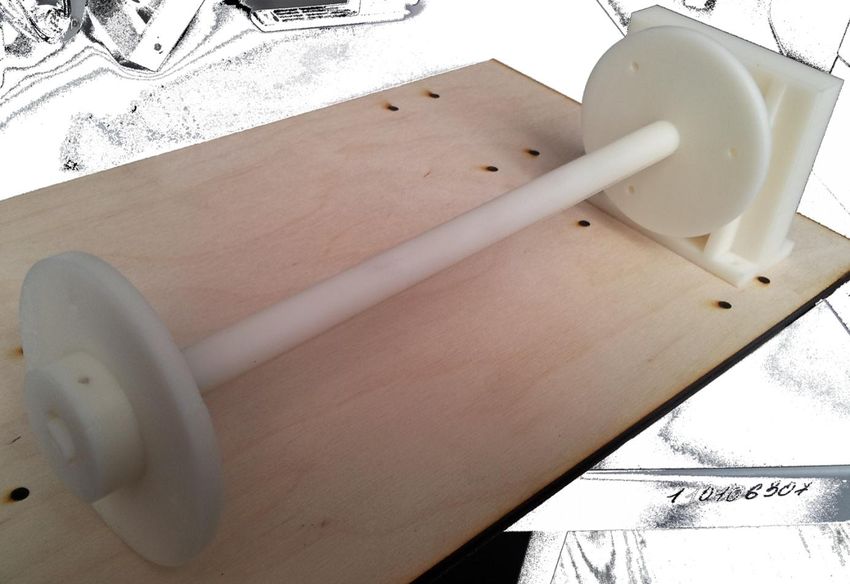
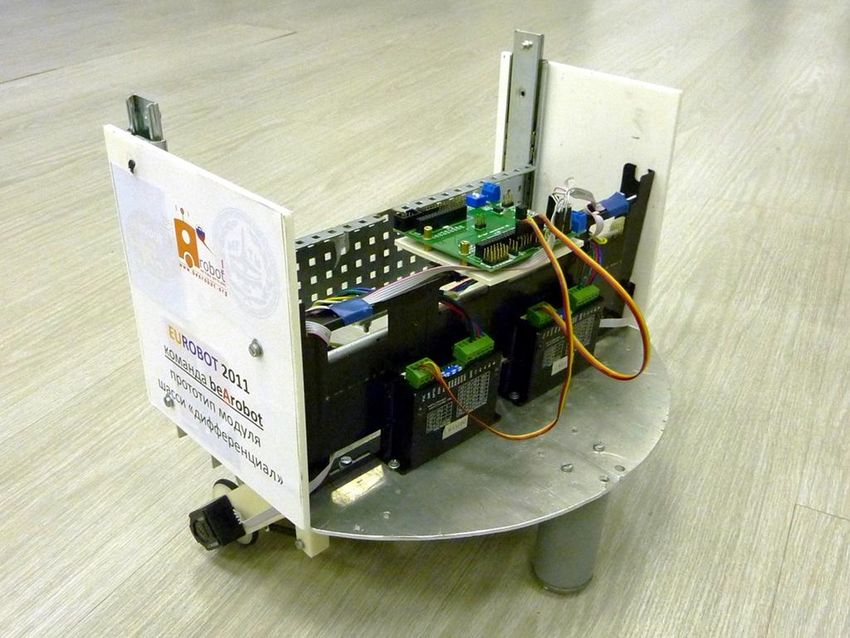
ИЗГОТОВЛЕНИЕ СТЕНДА
Обкаточный стенд на этапах
изготовления и сборки
(изготовление на 3D –принтере – фото справа)
Правая опора (внизу)
Сборка основного валика (вверху)ОПИСАНИЕ СТЕНДА
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЭЛЕКТРОДВИГАТЕЛЯ
Схема замещения: Система уравнений:
d
I r r L I( t) U E
a dt
d
J ( t) M( t) Ms ( t)
0 dt
M(t) Km I(t)
E Ke
ДУ, описывающее поведение электродвигателя постоянного тока
с возбуждением от постоянных магнитов (использовали ДПТ Maxon RE-max 24)
2 r r Ms ( t )
d d U a L d
Te Tm ( t) Tm ( t) ( t) Ms ( t )
2 dt Ce Ce Cm Cm Ce dt
dtОПИСАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
ДУ, описывающее поведение электродвигателя постоянного тока:
2 r r Ms ( t )
d d U a L d
Te Tm ( t) Tm ( t) ( t) Ms ( t )
2 dt Ce Ce Cm Cm Ce dt
dt
Здесь:
L 6
Te 48.428 10 - электромагнитная постоянная времени цепи якоря
r rd
Jo ( r rd) 3- электромеханическая постоянная времени
Tm 6.46 10
Ce Cm
3
Ce 15.062 10 В/(рад/с)
3
Cm 15.1 10 Н*м/А
3
L 0.154 10
Гн - индуктивность обмотки якоря
r 3.18 Ом - активное сопротивление обмотки якоря
rd 0 Ом - дополнительное сопротивление
7 кг*м2 – общий момент инерции двигателя
Jo 4.62 10
- скважность ШИМ импульса.
Ms(t) – внешний момент сопротивленияХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ
Механические характеристики
электродвигателя при различных
скважностях (напряжениях питания).
Зависимости частоты вращения
ротора электродвигателя от
времени при различных моментах
сопротивления.РАСЧЕТНАЯ СХЕМА СТЕНДА
Система дифференциальных уравнений:
2
d
A
2
a( t ) M( t) R
1
K F( t) (Колесо)
dt
2 1
d
x( t) F( t) (Толкатель)
2 m m
dt 11 13
Начальные условия: x(0) = 0, a(0) = 0, +
x’(0) = 0, a’(0) = 0
А - общий момент инерции системы, где r – радиус вала:
+
2 2
R R
1 2 2 1 2 2 1 1 2 1
A m R r J m R r m r
2 1 1 2 3 3 R 2 16 R
3 3
2 2 2 2
R R R R
1 2 1 1 2 2 1 1 2 2 1 1
m r m R r m R r J
2 15 R 2 4 4 R 2 2 2 R 5 R
2 2 2 2ПРОГРАММНАЯ РЕАЛИЗАЦИЯ
Состав программного обеспечения:
• низкоуровневые алгоритмы управления на контроллере –
исполнение режима движения робота;;
• высокоуровневые алгоритмы на мощном вычислителе:
- планирование движения робота;;
- смена режимов движения мобильного робота;;
- генерация команд управления для низкого уровня;;
- сервер удаленной отладки.РАЗРАБОТАННОЕ ПО ДЛЯ ПК
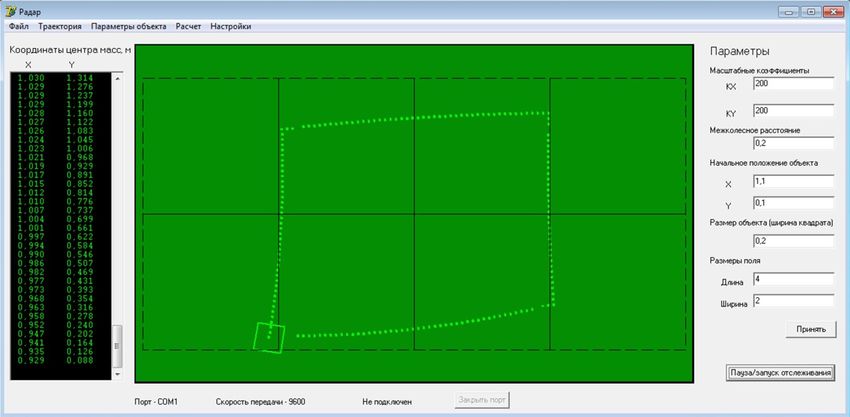
Область задания параметров объекта:
Область отображения
расчетных данных межколесного расстояния, габаритов и т.д.
Установка настроек СОМ порта Область отображения траекторииПОДХОД К ДИАГНОСТИРОВАНИЮ И НАСТРОЙКЕ
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДОМ
1. Создание математических моделей:
Электродвигателя
Ходовой части мобильного робота
2. Анализ алгоритмов управления
3. Анализ погрешностей управления
4. Вынесение рекомендаций по оптимальному
управлению системойПРОВЕДЕНИЕ ИСПЫТАНИЙ Данный стенд позволяет проводить два вида испытаний: Отработка маневров по заданной траектории Отработка маневров при заданном законе внешнего воздействия
ПРОВЕДЕНИЕ ИСПЫТАНИЙ – «ПРЯМАЯ» Длина траектории 4 м. Траектория до настройки (отклонение 86 см): Алгоритм управления - PID По результатам тестов можно сделать вывод о качестве алгоритмов управления, качестве изготовлении механики. Траектория после настройки (отклонение 8 см):
ПРОВЕДЕНИЕ ИСПЫТАНИЙ – «КВАДРАТ» Траектория до настройки (среднее отклонение 10см)
РЕЗУЛЬТАТЫ РАБОТЫ Разработанный стенд позволяет: формировать различные траектории движения мобильного робота без необходимости использования большого пространства для этого;; независимо получать характеристики движения робота;; оценить качество настройки системы управления;; Настроить систему управления движением мобильного робота оптимально для заданных условий.
РЕЗУЛЬТАТЫ И ДАЛЬНЕЙШЕЕ РАЗВИТИЕ
Качественная настройка САУ электропривода позволяет упростить
навигационные системы (в частности навигацию при помощи
одометрии, т.к. меньше отклонения от траектории).
Стенд позволяет тестировать
мобильных роботов
со следующими параметрами:
Межколесное расстояние: 120-400 мм.
Габариты: не менее 150х150 мм.
не более 450х450 мм.
Масса: до 20 кг.
Диаметр колес: 50 - 150 мм.
В дальнейшем планируется апробировать данных подход
при подготовке к соревнованиям Eurobot
(получить мат.модели ходовых частей мобильных роботов)V. ФУНКЦИОНАЛЬНЫЙ ГЕНЕРАТОР
Устройство представляет собой функциональный генератор
сигналов с прямым цифровым синтезом частоты.
Основная идея: создание функционального генератора в рамках
лаборатории Фаблаб.БЛОК ПИТАНИЯ ГЕНЕРАТОРА Характеристики блока питания: 1. Тип – линейный 2. Входное напряжение – 220 В, 50 Гц 3. Потребляемая мощность - не более 5 Вт 4. Выходное напряжение - ±15 В, +5 В 5. Выходной ток – 140 мА (для канала +5 В), 20мА (для каналов ± 15 В) 6. Коэффициент пульсаций выходного напряжения – не более 25·10-6
ЛИЦЕВАЯ ПАНЕЛЬ ГЕНЕРАТОРА
ОСНОВНАЯ ПЛАТА
ОСНОВНАЯ ПЛАТА
РЕЗУЛЬТАТЫ ИЗМЕРЕНИЙ
РЕЗУЛЬТАТЫ ИЗМЕРЕНИЙ
РЕЗУЛЬТАТЫ ИЗМЕРЕНИЙ
ОТКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО
«РОССИЙСКАЯ КОРПОРАЦИЯ
РАКЕТНО-КОСМИЧЕСКОГО
ПРИБОРОСТРОЕНИЯ И
ИНФОРМАЦИОННЫХ СИСТЕМ»
Пашинский И.О.ТЕКУЩАЯ ДЕЯТЕЛЬНОСТЬ ОАО «РКС» является ведущим предприятием России, специализирующимся на разработке, изготовлении, авторском сопровождении и эксплуатации космических информационных систем. Обладает собственной испытательной базой. Участвует во многих российских и международных проектах. Ведущие научно-технические направления: глобальная навигационная спутниковая система ГЛОНАСС, наземный автоматизированный комплекс управления космическими аппаратами космическая система спасания КОСПАС.
ОТРАСЛЕВОЙ ЦЕНТР ПРОЕКТИРОВАНИЯ
СПЕЦИАЛИЗИРОВАННЫХ СБИС
Возможности центра:
разработка специализированных сложно-
функциональных блоков (СФ-блоков);
разработка заказных и полузаказных БИС и СБИС;
разработка микроэлектромеханических систем
(МЭМС);;
производство БИС, СБИС и полупроводниковых
приборов;;
испытательный комплексИНФОРМАЦИОННЫЕ ИСТОЧНИКИ
1. И.О. Пашинский, А.В. Юдин Интеллектуальная система управления электроприводом
в задачах навигации мобильного робота // Сборник научных трудов. 13-ая Молодежная
международная научно-техническая конференция «Наукоемкие технологии и
интеллектуальные системы». - Москва. 27-28 апреля 2011 г.- с. 257-261.
2. Kuturov, A., Yudin, A., Pashinskiy, I., Chistyakov, M.: Team Development of an Autonomous
Mobile Robot: Approaches and Results. Technical report, 4th International Conference on
Research and Education in Robotics, Prague, Czech Republic, June 15-17, 2011, pp. 187-201.
3. Vlasov, A., Yudin, A.: Distributed Control System in Mobile Robot Application: General
Approach, Realization and Usage. Technical report, 3rd International Conference on Research
and Education in Robotics, Rapperswil-Jona, Switzerland, May 27-30, 2010, pp. 180-192.
4. Ivanjko, E., Komsic, I., Petrovic, I.: Simple Off-Line Odometry Calibration of Differential
Drive Mobile Robots. Proceedings of 16th Int. Workshop on Robotics in Alpe-Adria-Danube
Region - RAAD 2007, Ljubljana, June 7-9, 2007.
5. Borenstein,J., Feng,L., Correction of Systematic Odometry Errors in Mobile Robots.
Proceedings of the 1995 International Conference on Intelligent Robots and Systems
(IROS '95), Pittsburgh, Pennsylvania, August 5-9, pp. 569-574.Спасибо за внимание! Мои контакты: e-mail: pashinsky007@mail.ru
Вы также можете почитать