Техническое описание изделия - IRB 1100
←
→
Транскрипция содержимого страницы
Если ваш браузер не отображает страницу правильно, пожалуйста, читайте содержимое страницы ниже
ROBOTICS Техническое описание изделия IRB 1100
Trace back information: Workspace 22A version a11 Checked in 2022-03-03 Skribenta version 5.4.005
Техническое описание изделия
IRB 1100-4/0.475
IRB 1100-4/0.58
OmniCore
Код документа: 3HAC064993-016
Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.
Технические описания могут быть изменены без предупреждения.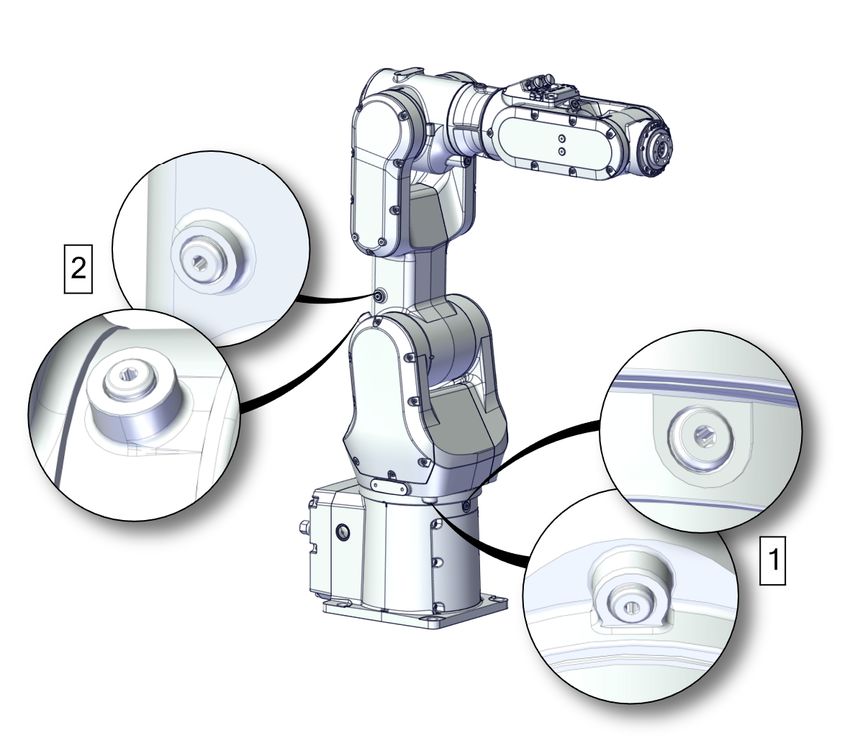
Информация в данном руководстве может быть изменена без предупреждения,
что не должно рассматриваться как нарушение компанией ABB своих
обязательств. Компания ABB не несет ответственности за любые ошибки в
данном руководстве.
Никакие положения данного руководства, если иное не оговорено специально,
не могут рассматриваться как гарантия или ручательство компании ABB от
убытков и ущерба, причиненного людям или имуществу, а также пригодности
для выполнения определенной функции и т. п.
Компания ABB не несет ответственности за любой ущерб, который может быть
причинен случайно или умышленно в результате использования данного
руководства и описанных в нем продуктов.
Данное руководство и его части запрещается воспроизводить или копировать
без письменного разрешения компании ABB.
Оставлено для использования в будущем.
Дополнительные копии данного руководства можно заказать в компании ABB.
Перевод оригинальных инструкций.
© Авторское право 2019--2022 компании ABB. Все права защищены.
Технические описания могут быть изменены без предупреждения.
Содержание
Содержание
Общие сведения о данных технических условиях ..................................................................... 7
1 Описание 9
1.1 Конструкция .................................................................................................... 9
1.1.1 Введение .............................................................................................. 9
1.1.2 Различные версии робота ....................................................................... 12
1.1.3 Определение обозначений версий ........................................................... 13
1.1.3.1 Технические данные ................................................................... 13
1.2 Стандарты ...................................................................................................... 19
1.2.1 Применимые стандарты ......................................................................... 19
1.3 Установка ....................................................................................................... 21
1.3.1 Начальные сведения об установке .......................................................... 21
1.3.2 Сборка манипулятора ............................................................................. 22
1.4 Калибровка и эталоны ...................................................................................... 23
1.4.1 Методы калибровки ............................................................................... 23
1.4.2 Синхронизационные метки и синхронизационная позиция координат .......... 25
1.4.3 Точная калибровка ................................................................................ 26
1.4.4 Absolute Accuracy калиборвка ................................................................. 28
1.5 Графики нагрузок ............................................................................................. 31
1.5.1 Введение .............................................................................................. 31
1.5.2 Графики ................................................................................................ 33
1.5.3 Максимальная нагрузка и момент инерции для полного и ограниченного
передвижения координаты 5 (центральная линия вниз) .............................. 37
1.5.4 Момент в запястье ................................................................................. 39
1.5.5 Максимальное ускорение TCP ................................................................ 40
1.6 Установка оборудования на робот ..................................................................... 41
1.7 Обслуживание и устранение неисправностей ..................................................... 44
1.8 Передвижение робота ...................................................................................... 45
1.8.1 Рабочий диапазон ................................................................................. 45
1.8.2 Координаты с ограниченным рабочим диапазоном .................................... 48
1.8.2.1 Регулировка рабочего пространства ............................................ 48
1.8.2.2 Механическое ограничение рабочего пространства ....................... 49
1.8.3 Производительность в соответствии со стандартом ISO 9283 ..................... 50
1.8.4 Скорость .............................................................................................. 51
1.8.5 Расстояние и время остановки робота ..................................................... 52
1.9 Подключения систем заказчика ......................................................................... 53
2 Технические данные вариантов и расширений 57
2.1 Начальные сведения о вариантах и расширениях ................................................ 57
2.2 Манипулятор ................................................................................................... 58
2.3 Напольные кабеля ........................................................................................... 62
3 Принадлежности 63
Указатель 65
Техническое описание изделия - IRB 1100 5
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.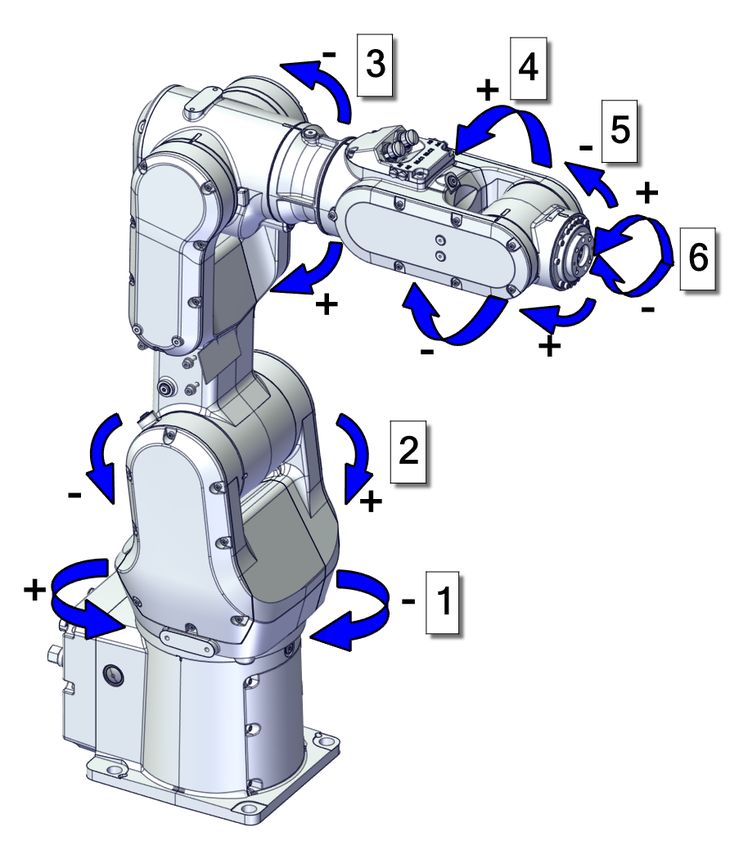
Эта страница оставлена пустой преднамеренно

Общие сведения о данных технических условиях
Общие сведения о данных технических условиях
О данном техническом описании изделия
Данные технические условия содержат описание характеристик манипулятора
или всего семейства манипуляторов, а именно:
• Конструкция и размеры
• Соответствие стандартам, правилам техники безопасности и требованиям
к эксплуатации оборудования
• Графики нагружения, монтаж или дополнительное оборудование,
движение и радиус действия робота
• Технические условия на доступные варианты и расширения
Данные технические условия описывают манипулятор, использующий
контроллер OmniCore.
Применение
Технические описания изделия используются для выяснения данных изделия
и его производительности, например, чтобы решить, какое изделие приобрести.
Информация об использовании изделия дается в руководстве по эксплуатации.
Данные технические условия предназначаются для следующего:
• Руководителей производства изделия и персонала, работающего с
изделием
• Специалистов по продажам и маркетингу
• Специалистов по приему заказов и обслуживанию клиентов
Ссылки
Документация, на которую даны ссылки в руководстве, перечислена ниже в
таблице.
Наименование документа Код документа
Product specification - OmniCore C line 3HAC065034--001
Product specification - OmniCore E line 3HAC079823--001
Руководство по эксплуатации - OmniCore C30 3HAC060860-016
Руководство по эксплуатации - OmniCore C90XT 3HAC073706-016
Руководство по эксплуатации - OmniCore E10 3HAC079399-016
Руководство по эксплуатации - IRB 1100 3HAC064992-016
Руководство по эксплуатации, запасные части - IRB 1100 3HAC064994-016
Circuit diagram - IRB 1100 3HAC066314-009
Редакции
Редакция Описание
A Первое издание
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 7
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.Общие сведения о данных технических условиях
Продолжение
Редакция Описание
B Опубликовано в выпуске 19D. В версию внесены следующие изме-
нения:
• Незначительные изменения.
• Изменено описание 3308-1 и 3350-400.
C Опубликовано в выпуске 20B. В версию внесены следующие изме-
нения:
• Изменены производственные для калибровки «Absolute
Accuracy» (Точность абсолютных показаний).
• Добавлен поддерживаемый контроллер OmniCore C90XT.
D Опубликовано в выпуске 20C. В версию внесены следующие изме-
нения:
• Добавлена степень защиты IP67 (расширение 3350-670) и тип
защиты Clean Room (расширение 3351-4).
• Добавлен 209-2 стандартный белый ABB.
E Опубликовано в выпуске 20D. В версию внесены следующие изме-
нения:
• Удалена лампа безопасности 3308-1.
• Добавлена макс. нагрузка на руку.
• Обновлен раздел гарантии.
F Опубликовано в выпуске 21A. В версию внесены следующие изме-
нения:
• Добавлен раздел CRB 1100.
• Незначительные изменения.
• Добавлено максимальное ускорение TCP.
• Обновлены рабочие характеристики в соответствии со стан-
дартом ISO 9283.
• Обновлено значение диаметра воздушных шлангов внутри
робота.
G Опубликовано в выпуске 21B. В версию внесены следующие изме-
нения:
• Обновлен текст о качестве крепежа.
• Обновлено описание защиты IP67.
• Добавлено примечание, напоминающее пользователям о не-
возможности регулировки расположения механических упо-
ров. См. Регулировка рабочего пространства на стр. 48.
• Удалены данные о разрешающей способности системы по
координате (оси).
• Добавлено примечание в главу о защите манипулятора.
H Опубликовано в выпуске 21C. В версию внесены следующие изме-
нения:
• Обновлено описание для 3300-20/21.
• Обновлено описание для 3203-x.
• Добавлен поддерживаемый контроллер OmniCore E10.
J Опубликовано в выпуске 21D. В версию внесены следующие изме-
нения:
• Вся информация о CRB 1100 удалена.
См. Техническое описание изделия - CRB 1100
K Опубликовано в выпуске 22A. В версию внесены следующие изме-
нения:
• [1 At translation (TP-967)] Added information about
length of thread engagement for attachment screws.
8 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.1 Введение
1 Описание
1.1 Конструкция
1.1.1 Введение
Общее введение для IRB 1100
Робот IRB 1100 является представителем новейшего поколения промышленных
роботов ABB Robotics с 6 степенями подвижности (координатами) и полезной
нагрузкой 4 kg, разработанным специально для отраслей обрабатывающей
промышленности, использующих гибкую автоматизацию на основе роботов,
например отрасли 3C (компьютеры, связь и бытовая электроника). Робот
имеет открытую конструкцию, которая обеспечивает высокую гибкость
применения и может широко взаимодействовать с внешними системами.
Сертификация для использования в чистых помещениях
xx2000001201
Концентрация частиц, генерируемых роботом (IRB 1100) соответствует
требованиям к классу чистоты 4 Clean room в соответствии со стандартом
DIN EN ISO 14644-1, -14.
В соответствии с результатами испытаний IPA, робот IRB 1100 может
использоваться в условиях чистых помещений.
Данные аттестации в отношении содержания молекулярных загрязнений в
воздухе см. ниже:
Параметры испытательной среды
Класс чистоты Скорость воз- Характер воз- Температура Относительная
воздуха в чи- душного потока душного потока влажность
стом помеще-
нии
(Согласно ISO
14644-1)
ISO 1 0,45 м/с вертикальный 22°C ± 0,5°C 45 % ± 0,5 %
ламинарный
(однонаправлен-
ный) поток
Параметры процедуры испытания
Производительность Установленная полезная Задействование по каждой
нагрузка координате
50 % и 100 % 4 кг по отдельности
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 9
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.1 Введение
Продолжение
Результат испытания / присвоенный класс:
При эксплуатации в указанных условиях испытания, IRB 1100, включая захват
и присоску, подходит для использования в чистых помещениях,
соответствующих техническим требованиям следующих классов чистоты
воздуха в соответствии с ISO 14644-1.
Параметры испытания Класс чистоты воздуха
Производительность = 50 % 2
Производительность = 100% 4
Общий результат 4
Степень защиты IP67
IRB 1100 может в качестве расширения (опции) обеспечивать степень защиты
IP67. Это расширение подразумевает установку дополнительного уплотнения,
механически обработанных деталей и прокладки.
При этом IRB 1100 соответствует требованиям к классу чистоты 5 Clean room
согласно DIN EN ISO 14644-1, -14.
Ассортимент программного обеспечения
IRB 1100 добавили целый ряд программных продуктов – все они подпадают
под лозунг Активная безопасность – чтобы не только защитить персонал от
маловероятных несчастных случаев, но также защитить инструменты робота,
периферийное оборудование и самого робота.
Операционная система
IRB 1100 оснащен контроллеромOmniCore C30/C90/E10 и программным
обеспечением для управления роботом, RobotWare. Программное обеспечение
RobotWare поддерживает все аспекты робототехнической системы, например
управление перемещением, разработку и выполнение прикладных программ,
связь и т. д. См. Operating manual - OmniCore.
Безопасность
Стандарты безопасности действуют для робота, манипулятора и контроллера.
Дополнительные функции
Для получения доступа к дополнительным функциям робот можно оснастить
дополнительным программным обеспечением, поддерживающим выполнение
определенных прикладных задач, например функции связи (связь по сети), а
также расширенные функции, например многозадачность, управление
датчиками и т. д. Полное описание дополнительного программного
обеспечения см. в Product specification - OmniCore C line и Product
specification - OmniCore E line.
Продолжение на следующей стр.
10 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.1 Введение
Продолжение
Координаты робота
xx1800002456
Позиция Описание Позиция Описание
1 Координата 1 2 Координата 2
3 Координата 3 4 Координата 4
5 Координата 5 6 Координата 6
Техническое описание изделия - IRB 1100 11
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.2 Различные версии робота
1.1.2 Различные версии робота
Общие сведения
Робот IRB 1100 предлагается в двух версиях.
Типы робота
Доступны следующие версии робота.
Тип робота Грузоподъемность (кг) Радиус действия (м)
IRB 1100-4/0.475 4 kg 0,475 m
IRB 1100-4/0.58 4 kg 0,58 m
12 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.3.1 Технические данные
1.1.3 Определение обозначений версий
1.1.3.1 Технические данные
Вес, робот
Таблица показывает вес робота.
Модель робота Масса
IRB 1100 21,1 kg
ПРИМЕЧАНИЕ
Вес не включает вес инструментов и другого установленного на роботе
оборудования!
Нагрузка на основание робота
На рисунке показаны направления сил нагрузки роботов.
Направления действительны для всех роботов: напольного, настольного,
настенного монтажа, а также подвешиваемого типа.
Txy
Fz
Fxy
Tz
xx1100000521
Fxy Сила в любом направлении в плоскости XY
Fz Сила в плоскости Z
Txy Изгибающий момент в любом направлении в плоскости XY
Tz Изгибающий момент в плоскости Z
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 13
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.3.1 Технические данные
Продолжение
В таблице указаны значения различных сил и моментов, воздействующих на
робота при совершении разного рода операций.
ПРИМЕЧАНИЕ
Данные значения усилия и вращающего момента являются предельными,
редко достижимыми в процессе обычной эксплуатации. Кроме этого, оба
значения никогда не бывают максимальными одновременно.
ПРЕДУПРЕЖДЕНИЕ
Установка робота ограничивается вариантами монтажа, приведенными в
следующих таблице(ах) нагрузок.
Напольные
Сила Долговременная нагрузка (в рабо- Максимально допустимая нагрузка
чем состояние) (аварийная остановка)
Усилие xy ±420 N ±710N
Усилие z +210 ±380 N +210 ±510 N
Вращающий ±180 Nm ±330 Nm
момент xy
Вращающий ±90 Nm ±140 Nm
момент z
Настенные
Сила Долговременная нагрузка (в рабо- Максимально допустимая нагрузка
чем состояние) (экстренный останов)
Усилие xy +210 ±370 N +210 ±660 N
Усилие z ±370 N ±540 Nm
Вращающий ±200 Nm ±370Nm
момент xy
Вращающий ±90 Nm ±140 Nm
момент z
Подвесной
Сила Долговременная нагрузка (в рабо- Максимально допустимая нагрузка
чем состояние) (экстренный останов)
Усилие xy ±420 N ±710 N
Усилие z -210 ±380 N -210 ±510 N
Вращающий ±180 Nm ±330 Nm
момент xy
Вращающий ±90 Nm ±140 Nm
момент z
Продолжение на следующей стр.
14 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.3.1 Технические данные
Продолжение
Требования к основанию
В таблице приведены требования к основанию с учетом веса установленного
робота.
Требование Значение Примечание
Плоскость поверхно- 0,1/500 mm Ровные основания дают лучшую повторяе-
сти основания мость калибровки резольвера по сравнению
с оригинальными настройками, полученными
при поставке от компании ABB.
Значение горизонтальности касается точек
крепления в основании робота.
Чтобы компенсировать неровности поверхно-
сти, можно выполнить новую калибровку ро-
бота в ходе его установки. Если калибровка
резольвера/энкодера изменена, это повлияет
на функцию absolute accuracy.
Максимальный наклон 5°
Минимальная частота 22 Hz Это значение рекомендуется для обеспече-
резонанса ния оптимальной производительности.
ПРИМЕ- Из-за жесткости основания нужно учесть
ЧАНИЕ массу робота с оборудованием. i
Если частота ре- Информацию о компенсации гибкости осно-
зонанса ниже вания см. в Application manual - Controller
рекомендуемой, software OmniCore, раздел Режим процесса
это может повли- движения.
ять на срок
службы манипу-
лятора.
i Приведенную минимальную резонансную частоту следует интерпретировать как частоту
массы/инерции робота, предполагаемую жесткостью робота, когда добавляются
транспортировочные кронштейны/торсионная упругость основания, то имеется жесткость
подставки, на которой установлен робот. Минимальная резонансная частота не должна
интерпретироваться как резонансная частота здания, пола и т. д. Например, если
эквивалентная масса пола очень высока, это не повлияет на движение робота, даже если
частота значительно ниже указанной частоты. Робот должен быть установлен максимально
жестко на полу.
Помехи от другого оборудования повлияют на точность робота и оборудования. Частота
резонанса робота находится в диапазоне 10 – 20 Гц, и помехи в области будут усилены, хотя
и немного заглушены сервоуправлением. Это может быть проблемой, в зависимости от
требований сферы применения. Если это создает проблему, робот необходимо изолировать
от среды.
Условия хранения робота
В таблице приведены рекомендованные условия хранения робота.
Параметр Значение
Минимальная температура окружающей среды -25°C (-13°F)
Максимальная температура окружающей среды +55°C (+131°F)
Максимальная температура окружающей среды (для +70°C (+158°F)
отрезка времени менее 24 часов)
Максимальная влажность окружающей среды 95 % при постоянной температу-
ре (только газообразные)
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 15
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.3.1 Технические данные
Продолжение
Условия эксплуатации робота
В таблице приведены рекомендованные условия эксплуатации робота.
Параметр Значение
Минимальная температура окружающей среды +5°C i (41°F)
Максимальная температура окружающей среды +45°C (113°F)
Максимальная влажность окружающей среды 95 % при постоянной температу-
ре
i При низкой температуре окружающей среды (ниже 10° C) перед запуском робота
рекомендуется фаза прогрева. Иначе существует риск, что робот остановится или будет
работать с меньшей производительностью, так как вязкость масла и смазки зависит от
температуры.
Классы защиты робота
В таблице ниже приведены типы и соответствующие им классы защиты робота.
Тип защиты Класс защиты
Манипулятор, тип защиты Standard IP40
IP67 (option 3350-670)
Манипулятор, тип защиты Clean Room ISO 4
Другие технические данные
Данные Описание Примечание
Уровень воздушного шу- Уровень звукового давления < 65 дБ (А) Lэкв (в соотв. с
ма за пределами рабочей зоны. директивой о машинах и ме-
ханизмах 2006/42/EC)
Потребление мощности при максимальной нагрузке
Тип передвижения IRB 1100-4/0.475 IRB 1100-4/0.58
ISO Cube 282 275
Макс. скорость (Вт)
Робот в калибровочной позиции IRB 1100-4/0.475 IRB 1100-4/0.58
Тормоза включены (Вт) 70 79
Тормоза выключены (Вт) 154 160
E1 E2
E4 E3
A
xx1000000101
Позиция Описание
A 250 mm
16 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.3.1 Технические данные
Продолжение
Основные размеры IRB 1100-4/0.475
314
A 250 64 C
10
225
609
562
327
173
135 17
182
101
158
135
B
57 57
78 64
158
173
xx1800002606
Позиция Описание
A Радиус поворота: R85
B Радиус поворота: R109
C Радиус поворота: R61
Техническое описание изделия - IRB 1100 17
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.1.3.1 Технические данные
Продолжение
Основные размеры IRB 1100-4/0.58
364
A 300 64
C
10
280
664
617
327
135
17
182
101
158
135
B
57 57
78 64
158
173
xx1800002607
Позиция Описание
A Радиус поворота: R85
B Радиус поворота: R109
C Радиус поворота: R61
18 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.2.1 Применимые стандарты
Продолжение
1.2 Стандарты
1.2.1 Применимые стандарты
Общие сведения
Изделие соответствует требованиям ISO 10218-1:2011 Robots for industrial
environments - Safety requirements - Part 1 Robots (Требования по безопасности
для промышленных роботов. Часть 1. Роботы) и применимых разделов
нормативных документов, как указано в ISO 10218-1:2011. В случае отклонений
от требований ISO 10218-1:2011 они перечислены в декларации о соответствии
компонентов требованиям норм, которая входит в комплект поставки изделия.
Стандарты на роботов
Standard Описание
ISO 9283 Manipulating industrial robots – Performance criteria and
related test methods
ISO 9787 Robots and robotic devices – Coordinate systems and motion
nomenclatures
ISO 9946 Manipulating industrial robots – Presentation of characteristics
Другие стандарты, используемые при проектировании
Standard Описание
IEC 60204 Safety of machinery - Electrical equipment of machines - Part
1: General requirements, ссылка на нормативный документ
в ISO 10218-1
IEC 61000-6-2 Electromagnetic compatibility (EMC) – Part 6-2: Generic
standards – Immunity standard for industrial environments
IEC 61000-6-4 Electromagnetic compatibility (EMC) – Part 6-4: Generic
standards – Emission standard for industrial environments
ISO 13849-1:2006 Safety of machinery - Safety related parts of control systems
- Part 1: General principles for design, ссылка на нормативный
документ в ISO 10218-1
IEC 61340-5-1 Protection of electronic devices from electrostatic phenomena
- General requirements
Стандарты и нормативные акты для конкретных регионов
Standard Описание
ANSI/RIA R15.06 Safety requirements for industrial robots and robot systems
ANSI/UL 1740 Safety standard for robots and robotic equipment
CAN/CSA Z 434-03 Industrial robots and robot Systems - General safety
requirements
ANSI/ESD S20.20 Protection of Electrical and Electronic Parts, Assemblies and
Equipment (Excluding Electrically Initiated Explosive Devices)
EN ISO 10218-1 Robots and robotic devices — Safety requirements for industrial
robots — Part 1: Robots
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 19
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.2.1 Применимые стандарты
Продолжение
Отклонения
Отклонение для IRB 1100
[2 At translation (TP-967)] The IRB 1100 does not provide means of
installing adjustable mechanical stops on axis 1. Optional features provided by
SafeMove, safety-rated soft axis and space limiting can be used as risk reduction
measures in specific applications.
[3 At translation (TP-967)] For details about SafeMove, see Application
manual - Functional safety and SafeMove.
20 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.3.1 Начальные сведения об установке
1.3 Установка
1.3.1 Начальные сведения об установке
Общие сведения
IRB 1100 предлагается в двух вариантах, при этом все варианты могут
монтироваться на пол, в перевернутом/подвешенном положении, на стену
или в наклонном состоянии (под любым углом) и на стол. В зависимости от
варианта исполнения робота на инструментальном фланце (координата 6)
может быть установлен рабочий инструмент с максимальной массой 4 кг
(включая полезную нагрузку). См. Графики нагрузок на стр. 31.
Дополнительные нагрузки
Верхняя часть руки может дополнительно перемещать грузы массой 0,5 кг.
См. Установка оборудования на робот на стр. 41.
Ограничения рабочего диапазона
Рабочий диапазон координаты 1 можно ограничить с помощью механических
стопоров в качестве расширения. Смотрите Рабочий диапазон на стр. 47.
Техническое описание изделия - IRB 1100 21
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.3.2 Сборка манипулятора
1.3.2 Сборка манипулятора
Крепежные винты
В таблице ниже указан тип крепежных винтов и шайб, которые должны
использоваться для крепления робота к опорной плите/фундаменту.
Подходящие винты M12x25 (установка робота непосредственно на фунда-
мент)
Количество 4 шт.
Качество 8.8
Подходящая шайба 24 x 13 x 2.5, твердость стали 200HV
Направляющие штифты 2 шт., D6 x 20, ISO 2338 — 6m6x20 — A1
Момент затяжки 50 Nm±5 Nm
Длина зацепления резьбы Минимальное значение 12,5 mm для грунта с пределом
текучести материала 150 MPa
Требования к ровной поверх- 0,1/500 mm
ности
Расположение отверстий, основание
На рисунке показано расположение отверстий, используемых для крепления
робота.
6
135
11
11.5
5.5
4
10
135
10
11
R16
A-A A A
11.5
+0.012
4x M12 10 6 H7 0
4
5.5
11
135
5.5
11
11.5 +0.012
4x R16
135 6 H7 0
xx1800002448
22 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.4.1 Методы калибровки
1.4 Калибровка и эталоны
1.4.1 Методы калибровки
Описание
В этом разделе указаны различные типы калибровки и методы калибровки,
предоставленные компанией ABB.
Исходные данные калибровки, установленные в роботе, генерируются, когда
робот установлен на полу. При не напольной установке, точность не может
быть гарантирована. Калибровку робота следует провести после его установки.
Более детальная информация изложена в технической документации.
Типы калибровки
Тип калибровки Описание Метод калибровки
Стандартная калиб- Откалиброванный робот находится в калиб- Axis Calibration
ровка ровочной позиции.
Стандартные калибровочные данные нахо-
дятся на плате SMB (плата последователь-
ного измерения) или EIB в роботе.
Калибровка Калибровка Absolute accuracy (абсолютная CalibWare
Absolute accuracy точность) основана на стандартной калиб-
(дополнительно) ровке и, кроме перемещения робота в син-
хронизационную позицию, также вносит
компенсацию для:
• механических отклонений в конструк-
тивных элементах робота;
• отклонения из-за нагрузки.
Калибровка Absolute accuracy фокусируется
на точности позиционирования в декарто-
вой системе координат для робота.
Калибровочные данные Absolute accuracy
находятся на SMB-плате (плата последова-
тельного измерения) в роботе.
Робот, откалиброванный с помощью
Absolute accuracy, одержит дополнительную
информацию на своей паспортной табличке.
Для восстановления 100% эффективности
функции Absolute accuracy и обеспечения
максимальной точности работы после вы-
полнения ремонта или операций обслужи-
вания, затрагивающих механическую
структуру робота, необходимо выполнить
повторную калибровку робота.
Краткое описание методов калибровки
Метод Axis Calibration
Axis Calibration представляет собой стандартный метод калибровки IRB 1100.
Это предпочтительный метод, позволяющий обеспечить надлежащие рабочие
характеристики.
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 23
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.4.1 Методы калибровки
Продолжение
Для метода Axis Calibration существуют следующие последовательности
действий:
• Точная калибровка
• Обновление счетчиков оборотов
• Опорная калибровка
Калибровочное оборудование для Axis Calibration поставляется в виде
рабочего комплекта.
Фактические указания по выполнению процедуры калибровки и по каждому
ее этапу приведены в пульте FlexPendant. В нем приведена поэтапная
процедура калибровки.
CalibWare — калибровка Absolute Accuracy
Инструмент CalibWare помогает выполнить процесс калибровки и рассчитывает
новые параметры компенсации. Более подробные сведения содержатся в
Application manual - CalibWare Field.
Если операция обслуживания выполняется в отношении робота, оснащенного
дополнительной функцией Absolute Accuracy, для обеспечения полноценной
работы необходимо выполнить повторную калибровку данной функции. В
большинстве случаев после замены деталей, не требующей разборки робота,
достаточно стандартной процедуры калибровки.
Расширение Absolute Accuracy зависит от положения монтажа робота. Данная
информация указана на паспортной табличке каждого робота. Для обеспечения
точности измерения абсолютных положений робот при повторной калибровке
должен находиться в правильном монтажном положении.
24 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.4.2 Синхронизационные метки и синхронизационная позиция координат
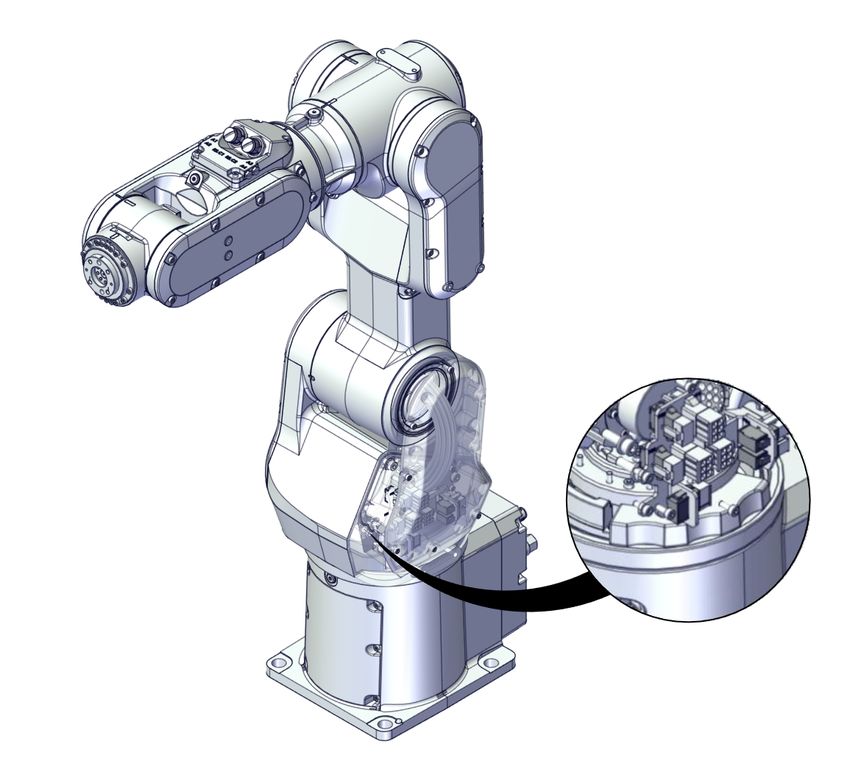
1.4.2 Синхронизационные метки и синхронизационная позиция координат
Введение
В этом разделе показана позиция синхронизационных меток и
синхронизационная позиция каждой координаты.
[4 At translation (TP-967)] Synchronization marks, IRB 1100
4 5 6
3
2
1
xx1800002455
ВНИМАНИЕ
Для калибровки координаты 6 паз на запястье необходимо совместить с
промаркированным отверстием под штифт на инструментальном фланце.
Перед монтажом приспособления на инструментальный фланец убедитесь,
что на приспособление нанесена заметная отметка соответствующего
положения.
Техническое описание изделия - IRB 1100 25
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
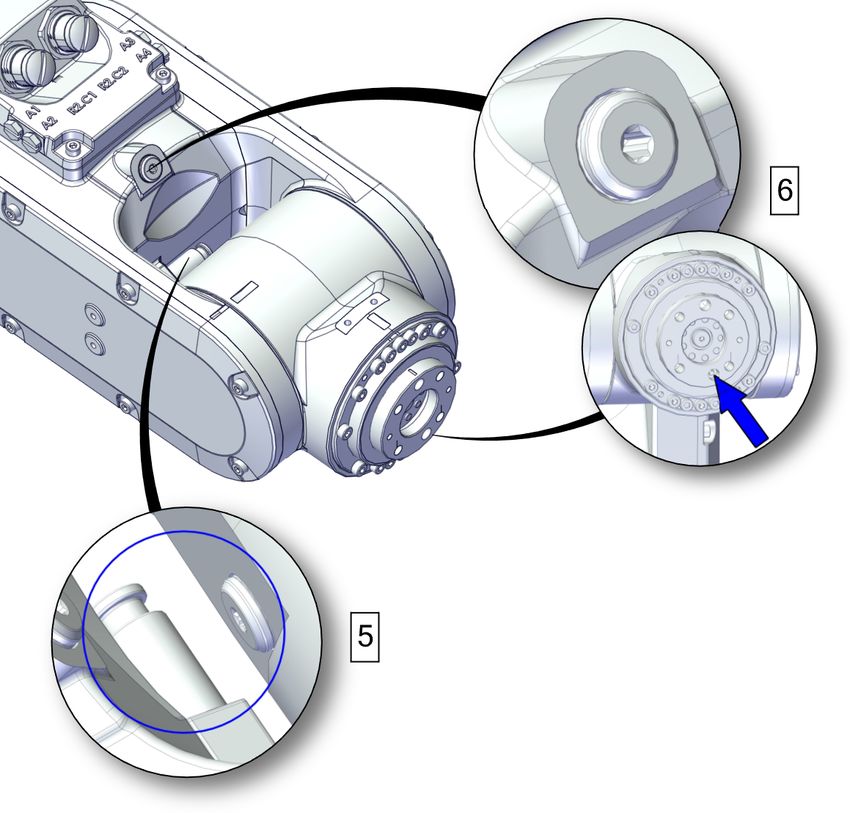
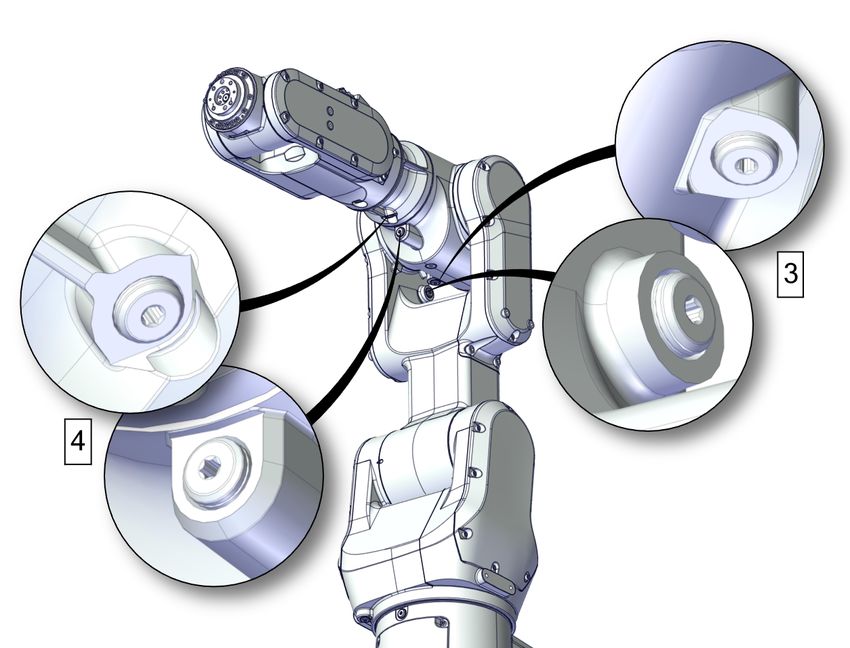
1.4.3 Точная калибровка
1.4.3 Точная калибровка
Общие сведения
Точная калибровка выполняется с помощью метода калибровки координаты.
xx1800003320
xx1800003514
Продолжение на следующей стр.
26 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.4.3 Точная калибровка
Продолжение
xx1800003515
Координаты
Позиция Описание Позиция Описание
1 Координата 1 2 Координата 2
3 Координата 3 4 Координата 4
5 Координата 5 6 Координата 6
Техническое описание изделия - IRB 1100 27
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.4.4 Absolute Accuracy калиборвка
1.4.4 Absolute Accuracy калиборвка
Назначение
Absolute Accuracy представляет собой подход к калибровке, который позволяет
повысить точность TCP. Разница в результатах работы идеального и реального
робота может составлять несколько миллиметров, эта разность возникает
из-за механических допусков и отклонения в конструкции самого робота.
Absolute Accuracy компенсирует этот вид погрешности.
Ниже приведено несколько примеров того, когда точность особенно важна:
• замена роботов;
• Оффлайн программирование с минимальной или без минимальной
корректировки
• онлайн программирование с точным перемещением и переориентацией
инструмента;
• программирование с точным движением смещения относительно,
например. системы видения или программирование смещения;
• повторное использование програм в различных приложениях.
Опция Absolute Accuracy интегрирована в алгоритмы контроллера и не требует
внешнего оборудования или расчета.
ПРИМЕЧАНИЕ
Данные о производительности применимы к соответствующей версии
RobotWare отдельно взятого робота.
xx1800002701
Также включен
В комплект поставки каждого робота Absolute Accuracy входит:
• заложенным параметром компенсации, который сохранен на серийной
измерительной панели
Продолжение на следующей стр.
28 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.4.4 Absolute Accuracy калиборвка
Продолжение
• сертификат о создании, представляющий протокол измерений Absolute
Accuracy для последовательности калибровки и проверки.
Напротив робота с уровнем калибровки Absolute Accuracy размещена
соответствующая надпись на манипуляторе.
Метод калибровки Absolute Accuracy (точность абсолютных показаний)
подходит для напольной, настенной и потолочной установки. Параметры
компенсации, сохраненные на плате серийных измерений робота, различаются
в зависимости от того, какой вариант абсолютной точности выбран.
Когда используется Absolute Accuracy.
Absolute Accuracy оттарирован относительно декартовой системы координат,
а не относительно особенностей сборки. Поэтому изменения в сборке (напр.
MoveAbsJ) не повлекут изменений в результатах.
В случае перевода робота в режим инвертора Absolute Accuracy следует
провести повторную калибровку.
Absolute Accuracy активен
Absolute Accuracy будет активен в следующих случаях:
• имеется любая функция движения в робото-целях (напр. MoveL) и
имеются ModPos в робото-целях
• смена направления
• линейное смещение
• Определение инструмента (4, 5, 6 точечное определение, фиксированный
TCP, стационарный инструмент)
• Определение рабочего объекта
Absolute Accuracy не активно
Ниже приведены примеры, когда Absolute Accuracy не активно:
• Любая функция основанная на общей цели (MoveAbsJ)
• Независимое соединение
• Общее перемещение
• Дополнительная ось
• Отслеживание перемещений
ПРИМЕЧАНИЕ
В системе робота, например, с дополнительной осью или движением
траектории Absolute Accuracy активен для манипулятора, но не для
дополнительной оси или системы слежения за движением.
Инструкции RAPID
Инструкции RAPID отсутствуют к данной опции
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 29
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.4.4 Absolute Accuracy калиборвка
Продолжение
Данные для производства
Типичные технологические данные о калибровке:
Робот Точность позиционирования (мм)
Средняя Макс. % В пределах 1 мм
IRB 1100-4/0.475 0,08 0,25 100
IRB 1100-4/0.58 0,10 0,25 100
30 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.1 Введение
1.5 Графики нагрузок
1.5.1 Введение
ПРЕДУПРЕЖДЕНИЕ
Очень важно всегда правильно определять данные о фактической и полезной
нагрузке робота. Неправильное определение данных по нагрузке может
привести к перегрузке робота.
В случае использования неправильных данных по нагрузке и/или нагрузок,
находящихся за пределами графика нагружения, следующие компоненты
могут оказаться повреждены в результате перегрузки:
• двигатели
• редукторы
• механическую конструкцию
ПРЕДУПРЕЖДЕНИЕ
В RobotWare предусмотрена сервисная подпрограмма LoadIdentify, которую
можно использовать для определения правильных параметров нагружения.
Подпрограмма автоматически определяет инструмент и нагрузку. Для
получения подробной информации см. Operating manual - OmniCore.
ПРЕДУПРЕЖДЕНИЕ
Гарантия не покрывает роботов, которые работали с неправильными
данными о нагрузке и/или нагрузками, выходящими за пределы графика
нагружения.
Общие сведения
На графиках нагружения показан номинальный момент инерции полезной
нагрузки J0, равный 0,012 кгм 2 , при этом корпус верхней части руки несет
дополнительную нагрузку в 0,5 кг.
В случае другого момента инерции график нагрузок будет другим. Для роботов,
у которых допустимы наклоны и которые монтируются на стены или в
перевернутом положении, подходит указанный график нагрузок, и поэтому
RobotLoad также можно использовать в пределах указанного наклона и
координат.
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 31
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.1 Введение
Продолжение
Управление случаем нагружения с помощью RobotLoad
Для верификации конкретного случая нагружения используйте надстройку
RobotStudio RobotLoad.
Результаты из RobotLoad являются действительными только в пределах
максимальных нагрузок и углов наклона. В случае превышения максимально
допустимой нагрузки на руку предупреждение не выдается. По поводу
перегрузок и особых случаев применения обращайтесь к ABB для проведения
дальнейшего анализа.
32 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.2 Графики
1.5.2 Графики
Графики для IRB 1100-4/0.475
0.30
1 kg
0.20
Z-distance (m)
2 kg
0.10
3 kg
4 kg
4.2
kg
0.00
0.00 0.10 0.20
L-distance (m)
xx1800002633
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 33
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.2 Графики
Продолжение
Графики для IRB 1100-4/0.475 «Вертикальное запястье» (±10 o )
L
o o
10 10
L - (m) Z
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40
0.00
0.05
4.2 kg 4 kg
3 kg
0.10
2 kg 1 kg
Z - (m)
0.15
0.20
0.25
0.30
0.35
0.40
xx1800002634
Для запястья вниз (отклонение в 0 o от вертикальной линии).
Описание
Максимальная нагрузка 4,2 кг
Zмакс 0,13 м
Lмакс 0,09 м
Продолжение на следующей стр.
34 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.2 Графики
Продолжение
Графики для IRB 1100-4/0.58
0.30
1 kg
0.20
Z-distance (m)
2 kg
0.10
3 kg
4 kg
4.2 kg
0.00
0.00 0.10 0.20
L-distance (m)
xx1800002635
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 35
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.2 Графики
Продолжение
Графики для IRB 1100-4/0.58 «Вертикальное запястье» (±10 o )
L
o o
10 10
L - (m)
Z
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40
0.00
0.05
4.2 kg 4 kg 3 kg 2 kg 1 kg
0.10
0.15
Z - (m)
0.20
0.25
0.30
0.35
0.40
xx1800002636
Для запястья вниз (отклонение в 0 o от вертикальной линии).
Описание
Максимальная нагрузка 4,2 кг
Zмакс 0,133 м
Lмакс 0,85 м
36 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.3 Максимальная нагрузка и момент инерции для полного и ограниченного передвижения
координаты 5 (центральная линия вниз)
1.5.3 Максимальная нагрузка и момент инерции для полного и ограниченного
передвижения координаты 5 (центральная линия вниз)
ПРИМЕЧАНИЕ
Общая нагрузка указана как: масса в кг, центр тяжести (Z и L) в метрах и
момент инерции (Jox, Joy, Joz ) в кгм 2 . L= кв. (X 2 + Y 2 ), см. рисунок.
Полное перемещение по координате 5 (−125°/+120°)
Коор- Тип робота Максимальный момент инерции
дина-
та
5 IRB 1100-4/0.475 Ja5 = Load x ((Z + 0.064) 2 + L 2 ) + max (J0x, J0y) ≤ 0.175
IRB 1100-4/0.58 kgm 2
6 IRB 1100-4/0.475 Ja6 = Load x L 2 + J0Z ≤ 0.085 kgm 2
IRB 1100-4/0.58
xx1400002028
Позиция Описание
A Центр тяжести
Описание
Jox, Joy, Joz Макс. момент инерции вокруг координат X, Y и Z в центре тяжести.
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 37
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.3 Максимальная нагрузка и момент инерции для полного и ограниченного передвижения
координаты 5 (центральная линия вниз)
Продолжение
Ограниченная координата 5, центральная линия вниз
Коор- Тип робота Максимальный момент инерции
дина-
та
5 IRB 1100-4/0.475 Ja5 = Load x ((Z + 0.064) 2 + L 2 ) + max (J0x, J0y) ≤ 0.175
IRB 1100-4/0.58 kgm 2
6 IRB 1100-4/0.475 Ja6 = Load x L 2 + J0Z ≤ 0.085 kgm 2
IRB 1100-4/0.58
xx1400002029
Позиция Описание
A Центр тяжести
Описание
Jox, Joy, Joz Макс. момент инерции вокруг координат X, Y и Z в центре
тяжести.
38 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.4 Момент в запястье
1.5.4 Момент в запястье
ПРИМЕЧАНИЕ
Значения крутящего момента в запястье приводятся исключительно для
справки и не должны использоваться для расчета допустимого смещения
нагрузки (положение центра тяжести) на графике нагружения, поскольку
они тоже ограничены крутящими моментами для основных координат, а
также динамическими нагрузками. Нагрузки руки также повлияют на график
допустимого нагружения. Для определения абсолютных пределов на графике
нагружения используйте надстройку RobotLoad в RobotStudio.
Момент
В таблице ниже показан максимально допустимый момент в зависимости от
полезной нагрузки.
Тип робота Макс. момент в за- Макс. момент в за- Макс. момент, до-
пястье координа- пястье координа- ступный при на-
ты 4 и 5 ты 6 грузке
IRB 1100-4/0.475 5,0 Nm 2,9 Nm 4 kg
IRB 1100-4/0.58 5,0 Nm 2,9 Nm 4 kg
Техническое описание изделия - IRB 1100 39
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.5.5 Максимальное ускорение TCP
1.5.5 Максимальное ускорение TCP
Общие сведения
При нагрузке ниже номинальной более высоких значений можно достичь
благодаря динамичному управлению перемещением QuickMove2. Для
получения специфических значений в уникальном цикле клиента или для
роботов, которые не указаны в таблице ниже, рекомендуем использовать
RobotStudio.
Максимальное ускорение декартовой конструкции для номинальных нагрузок
Тип робота Экстренный останов Управляемое движение
Макс. ускорение при номиналь- Макс. ускорение при номиналь-
ной нагрузке в центре массы ной нагрузке в центре массы
[m/s 2 ] [m/s 2 ]
IRB 1100-4/0.475 144 82
IRB 1100-4/0.58 137 71
ПРИМЕЧАНИЕ
Уровни ускорения для экстренного останова и управляемого движения
включают ускорение вследствие сил гравитации. Номинальная нагрузка
определяется по номинальной массе и центру масс с максимальным
отклонением в Z и L (см. график нагрузок).
40 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.6 Установка оборудования на робот
1.6 Установка оборудования на робот
Крепежные отверстия и размеры
На робот могут устанавливаться дополнительные грузы. Определения размеров
и масс приведены на следующих рисунках. Робот снабжен отверстиями для
установки дополнительного оборудования.
Максимальная допустимая нагрузка на руку зависит от центра тяжести нагрузки
на руку и полезной нагрузки робота.
Вариант Максимальная нагрузка на руку (кг)
IRB 1100-4/0.475 0.5
IRB 1100-4/0.58 0.5
Отверстия для установки дополнительного оборудования
B
B
(4x) M3 x6
145
C
16
B
(4x) M4x6
A
D
40
C
(4x) M5x10
169
40
D
xx1800002449
Пози- 4/0,475 4/0,58
ция
A 248 303
B 200 250
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 41
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.6 Установка оборудования на робот
Продолжение
17
E
F
(2x) M4 6
40
E
G
(4x) M3 6
14
F
426
(2x) M4 8
24
G
xx1800002450
Продолжение на следующей стр.
42 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.6 Установка оборудования на робот
Продолжение
Инструментальный фланец, стандартный
A
+0.021
J
0
+0.012
5 H7 0 6
20 H7
4.5
0.04
6
(4x) 90°
57.3
4x M5 6
0.25
45°
0.6
31.5
J-J
J
A
xx1800002451
ВНИМАНИЕ
Для калибровки координаты 6 паз на запястье необходимо совместить с
промаркированным отверстием под штифт на инструментальном фланце.
Перед монтажом приспособления на инструментальный фланец убедитесь,
что на приспособление нанесена заметная отметка соответствующего
положения.
Дополнительные сведения о синхронизационной метке см. в Руководство
по эксплуатации - IRB 1100.
Качество крепежа
Для крепления инструментов на фланце инструмента используйте только
винты класса качества 12,9. Для другого оборудования используйте винты и
момент затяжки, которые подходят для вашего применения.
Техническое описание изделия - IRB 1100 43
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.7 Обслуживание и устранение неисправностей
1.7 Обслуживание и устранение неисправностей
Общие сведения
Во время эксплуатации роботу требуется минимальное обслуживание. Его
конструкция позволяет осуществлять обслуживание по возможности проще:
• Используются не требующие обслуживания двигатели переменного
тока.
• Для смазывания редукторов используется консистентная смазка.
• Кабели прокладываются с намерением, что они прослужат долго, и если
маловероятная неисправность все-таки возникнет, модульная
конструкция позволяет их легко заменить.
Техническое обслуживание
Интервалы обслуживания зависят от способа использования робота.
Требуемые действия по обслуживанию будут также зависеть от выбранных
расширений. Подробные сведения о процедурах обслуживания даны в разделе
Обслуживание в Руководство по эксплуатации - IRB 1100.
44 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.8.1 Рабочий диапазон
1.8 Передвижение робота
1.8.1 Рабочий диапазон
Рисунок, рабочий диапазон IRB 1100-4/0.475
На рисунке показан неограниченный рабочий диапазон робота.
Pos 1
802.2
Z
Pos 0
488.6
Pos 9 453.4
Pos 6
Pos 7 Pos 3
Pos 5 327
Pos 2
Pos 4 141.3
Pos 8
126.2
0
X
0
475
475
87.6
430.7
248.2
153.8
188.4
437.4
xx1800002437
Positions at wrist center and angle of axes 2 and 3
Позиция на ри- Позиции в центре запястья (мм) Угол (градусы)
сунке
X Z Координата 2 Координата 3
pos0 314 562 0° 0°
pos1 0 802 0° -87,7°
pos2 53,8 327 9,7° 55°
pos3 475 327 90° -87,7°
pos4 437,4 141,3 113° -87,7°
pos5 -248,2 327 -26,4° -205°
pos6 -87,6 453,4 -115° 55°
pos7 -475 327 -90° -87,7°
pos8 -430,7 126,2 -115° -87,7°
pos9 188,4 488,6 113° -205°
Продолжение на следующей стр.
Техническое описание изделия - IRB 1100 45
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.8.1 Рабочий диапазон
Продолжение
Рисунок, рабочий диапазон IRB 1100-4/0.58
На рисунке показан неограниченный рабочий диапазон робота.
Pos 1
907.2
Z
Pos 0
617
Pos 9 517.1
473.5
Pos 6
Pos 7
327
Pos 5 Pos 2 Pos 3
Pos 8 Pos 4 100.3
81.8
0
X
82.6
91.5
0
580
304
534
580
525.8
112.4
184.6
237.3
xx1800002438
Положения центра запястья и угла для координат 2 и 3
Позиция на ри- Позиции в центре запястья (мм) Угол (градусы)
сунке
X Z Координата 2 Координата 3
pos0 364 617 0° 0°
pos1 0 907,2 0° -88°
pos2 184,6 327 12,5° 55°
pos3 580 327 90° -88°
pos4 534 100,3 113° -88°
pos5 -304 327 -28,3° -205°
pos6 -112,4 473,5 -115° 55°
pos7 -580 327 -90° -88°
pos8 -525,8 81,8 -115° -88°
pos9 237,3 517,1 113° -205°
Продолжение на следующей стр.
46 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.8.1 Рабочий диапазон
Продолжение
Вид сверху нарабочего диапазона
° R475 (IRB 1100-4/0.475)
30
+2
R580 (IRB 1100-4/0.58)
R109 (A)
Y
X
R53.8 (IRB 1100-4/0.475)
-23
0° R184.6 (IRB 1100-4/0.58)
xx1800002439
Рабочий диапазон
Координата Рабочий диапазон Примечание
Координата ±230° Рабочий диапазон
1 настенного робота
по координате 1
зависит от величи-
ны полезной нагруз-
ки и расположения
других координат.
Рекомендуется ис-
пользовать модели-
рование в
RobotStudio.
Координата -115°/+113°
2
Координата -205°/+55°
3
Координата ±230°
4
Координата -125°/+120°
5
Координата ±400° Значение по умол-
6 чанию.
±242° Максимальное ко-
личество оборотов.
Рабочий диапазон
по умолчанию для
оси 6 расширяется
с помощью измене-
ния значений пара-
метров программ-
ного обеспечения.
Техническое описание изделия - IRB 1100 47
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.8.2.1 Регулировка рабочего пространства
1.8.2 Координаты с ограниченным рабочим диапазоном
1.8.2.1 Регулировка рабочего пространства
Причины регулировки рабочего пространства манипулятора
Рабочий диапазон по каждой координате манипулятора настраивается в
программном обеспечении. Если существует риск столкновения манипулятора
с другими объектами на месте установки, его рабочее пространство должно
быть ограничено. Манипулятор всегда должен иметь возможность свободно
перемещаться в пределах всего рабочего пространства.
Настройка конфигурации рабочего пространства
Значения параметров для рабочих диапазонов перемещений по координатам
могут изменяться в пределах допустимого рабочего пространства и с учетом
доступных для робота расширений, при этом рабочее пространство по
умолчанию ограничивается или, наоборот, увеличивается. Допустимые рабочие
диапазоны перемещения и доступные расширения для каждой координаты
манипулятора указаны в Рабочий диапазон на стр. 47.
Механические упоры на манипуляторе
Механические упоры (стопоры) устанавливаются и могут устанавливаться на
манипуляторе в качестве ограничивающих устройств, которые гарантируют,
что при перемещении по координате манипулятор не выйдет за пределы
диапазона, заданного в параметрах программного обеспечения.
ПРИМЕЧАНИЕ
Механические упоры устанавливаются только в качестве меры
предосторожности, для физической остановки робота до того, как он выйдет
за установленные пределы диапазона перемещений. Столкновение с
механическим упором всегда требует дальнейших действий по ремонту, а
также поиску и устранению неисправностей.
Координата Неподвижный механический Передвижной механический
упор (стопор) i упор (стопор) ii
Axis 1 yes no
Axis 2 yes no
Axis 3 yes no
Axis 4 no no
Axis 5 yes no
Axis 6 no no
i Часть литой детали или деталь, неподвижно закрепленная на литой поверхности, которую
невозможно/нельзя снять.
ii Может устанавливаться в одном или нескольких положениях с целью сокращения диапазона
перемещения или может быть снят с целью увеличения диапазона перемещений.
48 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.8.2.2 Механическое ограничение рабочего пространства
1.8.2.2 Механическое ограничение рабочего пространства
Расположение механических упоров (стопоров)
Сменный механический упор (стопор) предусмотрен только для координаты 1.
xx1800002452
Техническое описание изделия - IRB 1100 49
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.8.3 Производительность в соответствии со стандартом ISO 9283
1.8.3 Производительность в соответствии со стандартом ISO 9283
Общие сведения
При номинальной максимальной нагрузке максимальное смещение и скорость
в 1.6 м/с на наклоненной испытательной пластине ISO, со всеми 6-ю
координатами. Значения в таблице ниже являются средними результатами
измерений в небольшом количестве роботов. Результат может отличаться в
зависимости от того, где в рабочем диапазоне расположен робот, от скорости,
конфигурации руки, с какой стороны приближаешься к позиции, направления
нагрузки системы руки. На результат могут влиять зазоры в редукторах.
Цифры AP, RP, AT и RT измеряются в соответствии с рисунком ниже.
xx0800000424
Позиция Описание Позиция Описание
A Запрограммированная пози- E Запрограммированный путь
ция
B Средняя позиция при выпол- D Фактический путь при выполнении
нении программы программы
AP Среднее расстояние от за- AT Максимальное отклонение от E до
программированной пози- среднего пути
ции
RP Допуск позиции B при по- RT Допуск пути при повторном выпол-
вторном позиционировании нении программы
IRB 1100 4/0,475 4/0,58
Точность позы, AP i (mm) 0,01 0,01
Повторяемость позы, RP (мм) 0,01 0,01
Время стабилизации положения, PSt (с) в преде- 0,08 0,19
лах 0,1 мм от нужного положения
Точность пути, AT (мм) 1,03 1,18
Повторяемость пути, RT (мм) 0,05 0,05
i AP по тесту ISO выше – это разница между заученной позицией (позиция изменяется в модуле
вручную) и среднюю позицию получают во время выполнения программы.
50 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.8.4 Скорость
1.8.4 Скорость
Максимальная скорость координаты
Тип робота Коорди- Коорди- Коорди- Коорди- Коорди- Коорди-
ната 1 ната 2 ната 3 ната 4 ната 5 ната 6
IRB 1100-4/0.475 460 °/s 380 °/s 280 °/s 560 °/s 420 °/s 750 °/s
IRB 1100-4/0.58 460 °/s 360 °/s 280 °/s 560 °/s 420 °/s 750 °/s
На случай использования, подразумевающего интенсивное и быстрое
передвижение, имеется контрольная функция для предотвращения перегрева
(интенсивный рабочий цикл).
Техническое описание изделия - IRB 1100 51
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.1 Описание
1.8.5 Расстояние и время остановки робота
1.8.5 Расстояние и время остановки робота
Введение
Расстояние и время остановки для остановки категории 0 и категории 1, как
того требует стандарт EN ISO 10218-1 Annex B, указано в Product
specification - Robot stopping distances according to ISO 10218-1
(3HAC048645--001).
52 Техническое описание изделия - IRB 1100
3HAC064993-016 Редакция: K
© Авторское право 2019--2022 компании ABB. Все права защищены.Вы также можете почитать