Векторный способ формирования траекторных параметров в задаче имитации боевого налета
←
→
Транскрипция содержимого страницы
Если ваш браузер не отображает страницу правильно, пожалуйста, читайте содержимое страницы ниже
| ISSN 2542-0542 Вестник Концерна ВКО «Алмаз – Антей» | № 2, 2019
УДК 629.7.015+004.94
А. П. Коновальчик, М. Ю. Конопелькин, М. А. Кудров,
Н. М. Гревцов, И. А. Мартынов
Векторный способ формирования траекторных параметров
в задаче имитации боевого налета
Рассмотрены вопросы построения математической модели, позволяющие моделировать движение воз-
душных объектов самолетного, ракетного и вертолетного типов. Приведены результаты моделирования
в случае выполнения различных пространственных маневров.
Ключевые слова: средство воздушного нападения, динамика полета, численное моделирование, вычис-
лительные методы.
Введение должны достичь. Таким образом, задача фор-
Несмотря на то что имитации боевого налета мирования траекторных параметров относится
посвящено много работ [1–7], до сих пор су- к типу краевых задач, что, безусловно, накла-
ществует потребность в реализации матема- дывает определенные ограничения на подход
тической модели на современных языках про- к ее решению. Как правило, для моделирова-
граммирования. В различных приложениях ния полета воздушных объектов прибегают к
постановка задачи имитации боевого налета численному интегрированию системы уравне-
может варьироваться, в результате чего тре- ний, описывающей движение в некоторой си-
буется внесение определенных поправок как стеме координат [1–7]. В случае задачи Коши
в математическую модель, так и в программ- такой подход крайней эффективен и позволяет
ную реализацию. Ввиду данных факторов получать достоверные результаты, однако при
задача программной реализации алгоритмов решении краевой задачи прямое численное
формирования траекторных параметров явля- интегрирование невозможно, приходится при-
ется актуальной. бегать, например, к неявным схемам, которые
Постановка задачи приводят к решению системы линейных ал-
Предполагается, что оператор системы ав- гебраических уравнений, или к методу при-
томатизированного проектирования (САПР) стрелки. Рассматриваемый в данной работе
радиолокационных станций (РЛС), осущест- векторный подход в силу особенности его по-
вляющий имитационный эксперимент, име- строения с высокой точностью удовлетворяет
ет возможность сформировать боевой удар. граничным условиям и требует значительно
Удар представляет собой совокупность групп меньше вычислений по сравнению с метода-
средств воздушного нападения (СВН), каждая ми, упомянутыми выше, что в рамках настоя-
из которых содержит некоторое количество щей постановки задачи повышает его привле-
конкретных СВН, выстроенных в боевом по- кательность. Следует отметить, что векторный
рядке. Требуется, чтобы СВН двигались в со- подход к расчету траекторных параметров уже
ответствии с боевым порядком по некоторому был развит коллективами ЦАГИ [8], однако
маршруту, сформированному оператором, а применялся только к задаче моделирования
также выполняли различные пространствен- воздушного боя и был реализован на устарев-
ные маневры, например «змейку», «шнек», ших сегодня языках программирования.
огибание рельефа местности, занятие эшелона Математическая модель, используемая
высоты, достижение определенной скорости и для решения задачи
т. д. Маршрут состоит из массива контрольных Далее рассматривается подход к формирова-
точек, задаваемых в терминах широты, долго- нию траектории полета одиночного СВН по
| Математика |
ты и высоты над уровнем моря, которые СВН контрольным точкам с выполнением различ-
ных пространственных маневров.
В основу математической модели поло-
© Коновальчик А. П., Конопелькин М. Ю., Кудров М. А.,
Гревцов Н. М., Мартынов И. А., 2019
жен так называемый векторный способ фор-
83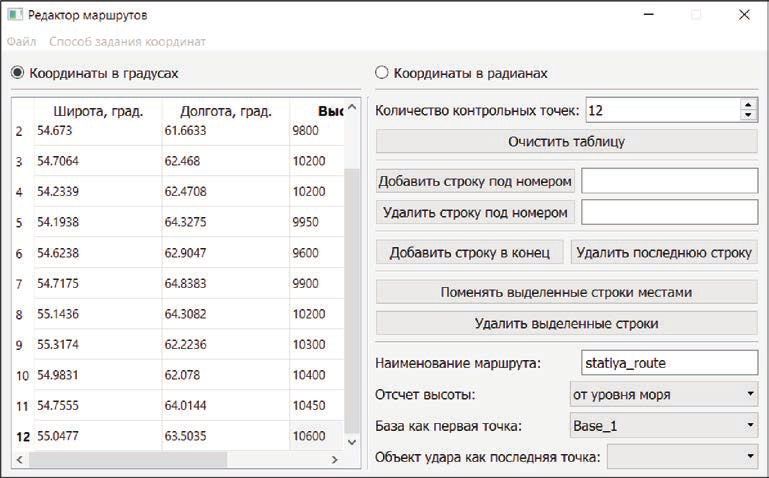
| Математика |
мирования траекторных параметров. Пусть
имеется инерциальная система координат с
ортонормированным базисом (i, j, k), а также n
поточная система координат с ортонормиро-
ванным базисом (ν, λ, µ), где орт ν направлен
из центра масс вдоль вектора скорости мо-
делируемого СВН; орт λ направлен перпен-
дикулярно ν, и его направление совпадает с n
направлением действия подъемной силы орт
µ дополняет тройку до правой. Взаимное рас-
положение описанных систем координат при-
n
ведено на рис. 1 (для наглядности начала от-
счетов систем координат совмещены). n
n n
Рис. 2. Примеры формирования вектора потребного
направления:
а – в случае отсутствия маневров в маршруте (1–3 –
Рис. 1. Взаимное расположение поточной номера контрольных точек маршрута); б – в случае
и инерциальной систем координат маневра «змейка»
Вестник Концерна ВКО «Алмаз – Антей» | № 2, 2019
Вектор ν описывает текущее направле- Итак, основу метода управления векто-
ние движения СВН. Изменяя его, можно управ- ром направления движения составляет алго-
лять и направлением движения СВН, обеспе- ритм формирования закона управления векто-
чивая прохождение через контрольные точки ром ν на базе вектора νn .
и выполнение пространственных маневров. Для обеспечения прохождения СВН че-
Пусть помимо текущего направления рез некоторую контрольную точку необхо-
движения, определяемого единичным векто- димо, чтобы векторы текущего и потребного
ром ν, задано потребное направление дви- направлений оказались сонаправленными. Ре-
жения, которое описывается единичным век- ализовать это можно путем поворота вектора
тором νn. В случае отсутствия в маршруте, текущего направления в сторону вектора по-
сформированном оператором САПР РЛС, про- требного направления до их совмещения. Дан-
странственных маневров, вектор νn ориентиру- ное преобразование можно осуществить путем
ется на следующую по порядку контрольную формирования производной вектора текущего
точку (рис. 2, а). Если присутствуют некоторые направления. С физической точки зрения пово-
маневры, то на соответствующем участке тра- рот вектора текущего направления движения
ектории вектор νn изменяет свою ориентацию осуществляется посредством формирования
в течение времени в соответствии с заданным потребной нормальной перегрузки, ориен-
| ISSN 2542-0542
маневром. Так, например, при выполнении тированной в пространстве так, чтобы СВН,
маневра «змейка» вектор νn поочередно пово- а вместе с ним и вектор ν поворачивались в
рачивается то в одну, то в другую сторону от- нужную сторону. В реальном полете это дости-
носительно направления на следующую кон- гается посредством отклонения соответствую-
трольную точку (рис. 2, б). щих аэродинамических поверхностей: напри-
84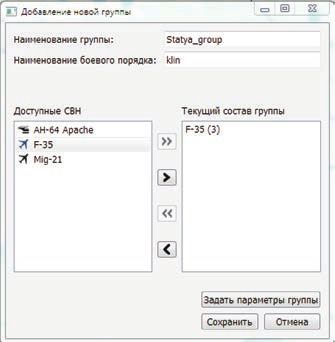
| ISSN 2542-0542 Вестник Концерна ВКО «Алмаз – Антей» | № 2, 2019
мер, руля высоты для маневра в вертикальной Для нахождения коэффициентов a и b
плоскости или элеронов в случае выполне- можно воспользоваться двумя условиями:
ния маневра в горизонтальной плоскости. 1) производная вектора текущего на-
В рамках постановки задачи имитации полета правления ортогональна самому вектору, т. е.
различных СВН детализация моделирования ( ν п , ν п ) = 0;
вплоть до учета отклонения органов управле- 2) модуль вектора ν п пропорционален
ния излишня и с точки зрения вычислительной углу рассогласования между текущим и потреб-
сложности, и с точки зрения требований к ха- ным направлениями движения, т. е. ν = kϕ.
рактеристикам рассчитываемых траекторий. Эти два условия дают следующие зна-
Пусть между векторами текущего на- чения a и b:
правления ν и потребного направления νn име- kϕ ϕ cos ϕ
a=− ;
ется рассогласование, которое можно опи- sin ϕ
сать величиной угла ϕ между ними. При этом
kϕ ϕ
угловая скорость вращения вектора текущего b= .
направления ων пропорциональна значению sin ϕ
рассогласования с коэффициентом пропор- С учетом этого выражение для потребной
циональности kϕ, который называют коэффи- скорости изменения вектора ν будет выглядеть
циентом уменьшения рассогласования. Связь следующим образом:
между последними тремя величинами можно
kϕ ϕ( ν п − ν cos ϕ )
описать следующим равенством: ν п = .
sin ϕ
ω ν = kϕ ϕ.
Следует заметить, что это выражение
Таким образом, требуется сформировать содержит особенность при ϕ = 0, но она рас-
значение производной вектора текущего на- крываемая:
ϕ
правления, которое будет обеспечивать пово- = 1.
рот вектора текущего направления в сторону sin ϕ
вектора потребного направления, причем с В [8] показано, что уравнение для теку-
помощью коэффициента уменьшения рассо- щей скорости изменения вектора ν имеет вид
гласования можно будет управлять скоростью
g
поворота, обеспечивая тем самым требуемое ν = (ny λ − j + ( j, ν)ν),
значение нормальной перегрузки. V
Если рассматривать движения в поточ- где g – ускорение свободного падения;
ной системе координат, то указанный выше по- V – модуль скорости цели;
ворот вектора текущего направления в вектор ny – нормальная скоростная перегрузка;
потребного будет выражаться в формировании j – вертикальный орт земной системы
некоторой производной для вектора потребно- координат;
го направления. Для отыскивания производ- λ – единичный вектор, направленный
ной вектора потребного направления можно вдоль подъемной силы.
представить его в виде линейной комбинации Из условия равенства текущей скоро-
векторов потребного и текущего направлений: сти изменения вектора ν скорости изменения
ν n = aνn + bν, вектора νn можно получить выражение для
потребного значения нормальной скоростной
где ν n – производная вектора по времени. перегрузки и направления ее действия [8]:
Это есть условие того, что компенсация V
(1)
| Математика |
рассогласования между текущим и потребным ny λ = ν n + j − ( j, ν )ν.
g
направлениями движения будет происходить
в плоскости векторов потребного и текущего Теперь, используя разностное выражение
направлений. производной, можно записать расчетную схе-
85| Математика |
му для определения вектора текущего направ- kϕ2 (B, B) + 2kϕ [(B, j) − ( j, ν)(B, ν)] +
ления на следующем шаге интегрирования: (3)
+1 − ( j, ν)( j, ν) − ny2max = 0.
ν k +1 = ν k + ν∆t,
Решением уравнения (3) является такое
где – шаг интегрирования.
∆t
значение коэффициента уменьшения рассогла-
Для управления текущей скоростью по- сования, которое обеспечивает поворот СВН с
лета можно при необходимости задавать неко- заданным максимальным значением нормаль-
торую тангенциальную перегрузку, исходя из ной перегрузки:
того требуется ли увеличить или уменьшить
−[(B, j) − ( j, ν)(B, ν)]
скорость полета. Конечная разностная схема kϕ = +
(B, B)
для нахождения скорости на следующем вре-
менном шаге выглядит так: [(B, j) − ( j, ν)(B, ν)]2 − (B, B)[1 − ( j, ν)( j, ν) − ny2max ]
+
(B, B)
V k +1 = V k + g (nx − (ν, j))∆t .
Описанный выше подход позволяет фор- Если присутствует информация об аэ-
мировать управление вектором текущего на- родинамических коэффициентах, то в рамках
правления, которое обеспечивает прохождение векторного подхода можно их учесть. Для это-
СВН через все контрольные точки, а также го можно записать в общем виде выражения
выполнение заданных боевых маневров. При для нормальной и тангенциальной перегрузок:
этом описанный сценарий может применяться P ( H , M, η)sin α qSC y (α, M)
ny = + ;
для моделирования движения в случае частич- mg mg
ного или даже полного отсутствия исходных
данных. P ( H , M, η)cos α qSC x (C y , M)
nx = − ,
Для более реалистичного моделирования mg mg
полета СВН необходимо учитывать аэродина- где P ( H , M, η) – тяга, зависящая от высоты
мические особенности каждого СВН. В част- полета H , числа Маха M, степени дроссели-
ности, описанный выше подход не учитывает рования силовой установки η;
ограничение на максимальную нормальную α – угол атаки;
Вестник Концерна ВКО «Алмаз – Антей» | № 2, 2019
перегрузку. m – масса СВН;
В случае превышения значения потреб- q – скоростной напор;
ной нормальной перегрузки можно скоррек- S – характерная площадь СВН;
тировать коэффициент уменьшения рассо- C y (α, M) – коэффициент подъемной силы,
гласования, вследствие чего поворот вектора который зависит от угла атаки и числа Маха;
текущего направления будет осуществляться C x (C y , M) – коэффициент сопротивле-
с такой скоростью, чтобы значение нормаль- ния, зависящий от числа Маха и коэффициен-
ной перегрузки находилось в пределах допу- та подъемной силы.
стимого. Выражение (1) можно представить в Если получено значение скоростной нор-
следующем виде: мальной перегрузки ny , задано значение тан-
генциальной перегрузки nx (не превышающее
V
ny λ = ν n + j( j, ν) = kϕ B + j − ( j, ν)ν = A, (2) предельно допустимую), то посредством реше-
g ния системы уравнений можно найти значения
угла атаки и степень дросселирования силовой
g ϕ( ν п − ν cos ϕ)
где B = . установки, т. е. тягу. Стоит отметить, что зна-
V sin ϕ чение нормальной перегрузки высчитывается в
Если ( A, A) > ny2max , где ny max – макси- соответствии с выражениями (2) и (3), но тан-
| ISSN 2542-0542
мальное значение нормальной перегрузки, то генциальная перегрузка по умолчанию равна
для нахождения коэффициента уменьшения нулю, ее значение меняется только в случае
рассогласования можно решить следующее выполнения маневра по скорости, заданного
квадратное уравнение: пользователем, при этом значение тангенци-
86| ISSN 2542-0542 Вестник Концерна ВКО «Алмаз – Антей» | № 2, 2019
альной перегрузки линейно изменяется вплоть ного программирования: основным элементом
до предельно допустимой. является класс с набором методов. Конструк-
Следует отметить, что для детального тор класса позволяет передавать краевые усло-
моделирования движения СВН с учетом изме- вия (координаты контрольных точек, маневры)
нения модуля скорости по указанному выше и летно-технические характеристики. У класса
алгоритму требуется наличие информации о присутствует расчетный метод, позволяющий
зависимостях аэродинамических коэффициен- запускать расчет траектории с заданными в кон-
тов от условий полета. В частности, необходи- структоре класса условиями. После заверше-
мо иметь информацию о зависимости коэффи- ния работы расчетного метода можно вызвать
циента подъемной силы от угла атаки и числа методы, возвращающие результаты расчета.
Маха C y (α, M), зависимости коэффициента В основу концепции архитектуры была
сопротивления от коэффициента подъемной заложена перспектива интеграции компонента
силы и числа Маха C x (C y , M), а также о вы- в общую интеграционную платформу, а также
сотно-скоростных характеристиках силовой работы с группами СВН. Помимо непосред-
установки P ( H , M, η). ственно расчетных классов и интерфейсов,
В окончательном виде полная разност- реализовывается масштабная база данных, в
ная схема представлена следующими соотно- которой хранятся как летно-технические ха-
шениями: рактеристики СВН, так и результаты моде-
ν k +1 = ν k + ν k dt; лирования и информация по группам. Основ-
ной инструмент, используемый для создания
r k +1 = r k + V k ν k dt;
программы, – библиотека Qt [9]. На рис. 3–6
V k +1 = V k + g (nx − ( ν k , j)) dt ;
продемонстрированы элементы отладочного
графического интерфейса (в интеграционной
ny mg − qSC y (α n , M) платформе САПР РЛС свой графический ин-
α n +1 = arcsin ; терфейс, интегрироваться будет только расчет-
P n ( H , M, η)
ная модель). Основное окно интерфейса ото-
nx mg + qSC x (C y , M) бражает карту местности, на которой можно
P n +1 ( H , M, η) = , размещать контрольные точки, задавать манев-
cos α n
ры. В верхней панели интерфейса расположе-
где r k – радиус-вектор положения центра масс ны инструменты, позволяющие администриро-
СВН на k-м шаге интегрирования. вать базу данных: задавать летно-технические
Описанный подход можно применять характеристики новых СВН, редактировать
также для расчета траекторных параметров в уже имеющиеся СВН в базе данных, форми-
случае моделирования огибания рельефа мест- ровать группы СВН, запускать расчет и про-
ности маневренным истребителем или крыла- сматривать результаты (см. рис. 3).
той ракетой. На рис. 4 приведен пример создания
Особенности программной реализации группы СВН. В первую очередь выбирается
На основе математической модели был спро- состав группы (рис. 4, а), затем настраивается
ектирован программный компонент, который боевой порядок (рис. 4, б).
предоставляет API для расчета траекторий. На рис. 5 представлен пример отобра-
Программный компонент был выполнен в жения рассчитанных траекторий для группы,
рамках парадигмы объектно-ориентирован- состоящей из трех СВН, которые выстроены
| Математика |
Рис. 3. Панель инструментов отладочного графического интерфейса
87| Математика |
Рис. 4. Настройка группы СВН: состав группы (а), боевой порядок (б)
Вестник Концерна ВКО «Алмаз – Антей» | № 2, 2019
Рис. 5. Пример работы алгоритма
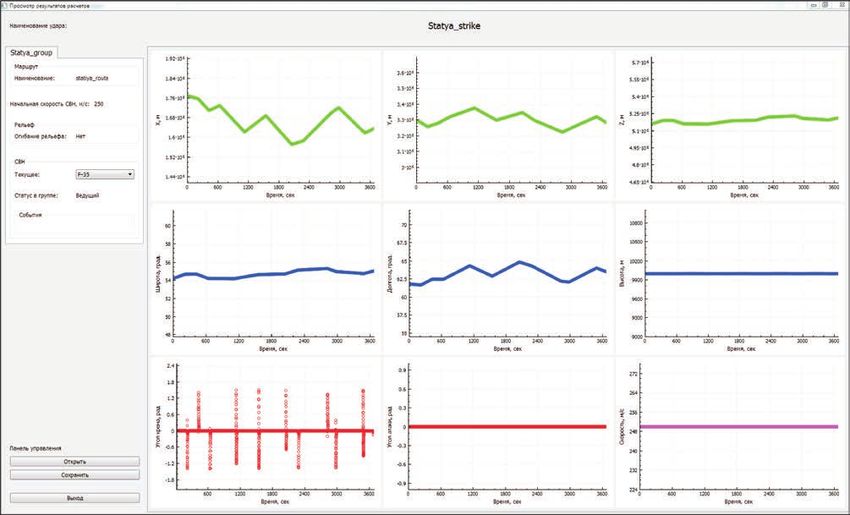
в боевом порядке «клин» в соответствии с них графика). Стоит отметить, что скорость
рис. 4, б без выполнения маневров, только с полета постоянна на протяжении всего поле-
учетом прохождения через контрольные точки, та в силу того, что не были заданы маневры
заданные на рис. 6. по скорости.
На рис. 7 показаны более детализиро- Заключение
ванные результаты расчета, которые для од- В работе описаны главные принципы по-
ного СВН, выбранного в левой части панели, строения траекторных параметров на основе
| ISSN 2542-0542
включают в себя отображения геоцентриче- управления направлением вектора движения
ских координат от времени (три верхних гра- СВН. Метод позволяет, с одной стороны, рас-
фика), геодезических координат от времени считывать траектории для СВН, по которым
(три средних графика), углы тангажа, крена и известен очень ограниченный набор исход-
скорость в зависимости от времени (три ниж- ных данных, с другой – при наличии подроб-
88| ISSN 2542-0542 Вестник Концерна ВКО «Алмаз – Антей» | № 2, 2019
Рис. 6. Контрольные точки маршрута
Рис. 7. Детализированные результаты расчета траектории
ной информации об аэродинамических харак- торным подходом. Именно благодаря краевому
теристиках СВН осуществлять расчет с высо- характеру задачи векторный подход к форми-
кой точностью. рованию траекторных параметров – один из
В рамках описанной постановки задачи самых оптимальных.
| Математика |
требуется удовлетворение граничным услови- Список литературы
ям, что делает применение подходов, основан- 1. Тараненко В. Т., Момджи В. Г. Прямой вари-
ных на интегрировании системы уравнений, ационный метод в краевых задачах динамики
гораздо более трудоемким по сравнению с век- полета. М.: Машиностроение, 1986. 127 с.
89| Математика |
2. Чепурных И. В. Динамика полета самолетов: 6. Коровина С. К. Нелинейная динамика
учебное пособие. Комсомольск-на-Амуре: и управление: сборник статей / под ред.
ФГБОУ ВПО «КнАГТУ», 2014. 112 с. С. В. Емельянова. М.: ФИЗМАТЛИТ, 2010. 400 с
3. Булинский В. А. Динамика маневрирования 7. Канатников А. Н. Построение траекторий
самолета-истребителя в воздушном бою. М.: летательных аппаратов с немонотонным изме-
Военное издательство Министерства Обороны нением энергии // Наука и образование. 2013.
Союза ССР, 1957. 200 с. № 4. URL: http://technomag.bmstu.ru/doc/554666.
4. Свирневский Н. С. Имитация полета крылатой html (дата обращения 11.04.2018).
ракеты на основе объектно-ориентированной 8. Гревцов Н. М., Мельц И. О. Формирование
методологии проектирования программной управления движением для расчета траекто-
системы // Вiсник Хмельницкого нацiонального рий самолета // Ученые записки ЦАГИ. 2007.
унiверситету. 2012. № 6. С. 203–207. Т. XXXVIII. № 3–4. С. 135–143.
5. Ефимов В. В. Основы авиации. Ч. I. Основы 9. Бланшет Ж., Саммерфилд М. Qt4: Про-
аэродинамики и динамики полета летательных граммирование GUI на С++. М.: Кудиц-пресс,
аппаратов: учебное пособие. М.: МГТУ ГА, 2008. 718 с.
2003. 64 с. Поступила 29.11.18
Коновальчик Артем Павлович – кандидат технических наук, заместитель генерального конструктора по пер-
спективным проектам АО «Концерн ВКО «Алмаз – Антей», г. Москва.
Область научных интересов: суперкомпьютерные технологии, распределенное моделирование, специализирован-
ные программные комплексы.
Конопелькин Максим Юрьевич – заместитель начальника отдела разработки САПР АО «Концерн ВКО
«Алмаз – Антей», г. Москва.
Область научных интересов: суперкомпьютерные технологии, распределенное моделирование, специализирован-
ные программные комплексы.
Кудров Максим Александрович – кандидат технических наук, доцент, ведущий научный сотрудник-заведующий
Вестник Концерна ВКО «Алмаз – Антей» | № 2, 2019
лабораторией информационных технологий и прикладной математики Федерального государственного автономного
образовательного учреждения высшего образования «Московский физико-технический институт (национальный
исследовательский университет)», г. Москва.
Область научных интересов: математическое моделирование, численные методы, специализированные программ-
ные комплексы
Гревцов Николай Максимович – кандидат технических наук, старший научный сотрудник Федерального госу-
дарственного автономного образовательного учреждения высшего образования «Московский физико-технический
институт (национальный исследовательский университет)», г. Москва.
Область научных интересов: динамика полета, математическое моделирование.
Мартынов Иван Алексеевич – научный сотрудник Федерального государственного автономного образователь-
ного учреждения высшего образования «Московский физико-технический институт (национальный исследова-
тельский университет)», г. Москва.
Область научных интересов: динамика полета, математическое моделирование, численные методы.
| ISSN 2542-0542
90| ISSN 2542-0542 Вестник Концерна ВКО «Алмаз – Антей» | № 2, 2019
Vector method in generating trajectory parameters
in the air raid simulation task
The paper focuses on the problems of mathematical model development that allow simulating the motion of
airborne objects of aircraft, missile and helicopter types. The simulation results of various spatial maneuvers
are given.
Keywords: air assault weapon, flight dynamics, numerical simulation, computational methods.
Konovalchik Artem Pavlovich – Candidate of Engineering Sciences, Deputy General Designer for Prospective Projects,
Joint-stock Company “Concern “Almaz – Antey”, Moscow.
Science research interests: supercomputer technologies, distributed simulation, specialized software systems.
Konopelkin Maksim Yurievich – Deputy Head of CAD Development, Joint-stock Company “Concern “Almaz – Antey”,
Moscow.
Science research interests: supercomputer technologies, distributed simulation, specialized software systems.
Kudrov Maksim Aleksandrovich – Candidate of Engineering Sciences, Acting Dean of Department of Aeromechanics
and Flight Engineering, Moscow Institute of Physics and Technology, Associate Professor, Department of General Physics,
Moscow.
Science research interests: numerical methods and software systems, mathematical simulation.
Grevtsov Nikolay Maksimovich – Candidate of Engineering Sciences, Senior Research Fellow, Moscow Institute of
Physics and Technology, Moscow.
Science research interests: flight dynamics, mathematical simulation.
Martynov Ivan Alekseevich – Research Fellow, Moscow Institute of Physics and Technology, Moscow.
Science research interests: flight dynamics, mathematical simulation, numerical methods.
| Математика |
91Вы также можете почитать