ИСПОЛЬЗОВАНИЕ ТЕХНОЛОГИИ ВИРТУАЛЬНЫХ ПОЛЕТОВ С ПОМОЩЬЮ БОРТОВОЙ МОДЕЛИ ДЛЯ ПРОГНОЗА РАЗВИТИЯ ЛЕТНОЙ СИТУАЦИИ - С.Г.БАЖЕНОВ (ЦАГИ), Г.С.ВЕРЕСНИКОВ ...
←
→
Транскрипция содержимого страницы
Если ваш браузер не отображает страницу правильно, пожалуйста, читайте содержимое страницы ниже

ИСПОЛЬЗОВАНИЕ ТЕХНОЛОГИИ ВИРТУАЛЬНЫХ
ПОЛЕТОВ С ПОМОЩЬЮ БОРТОВОЙ МОДЕЛИ ДЛЯ
ПРОГНОЗА РАЗВИТИЯ ЛЕТНОЙ СИТУАЦИИ
С.Г.БАЖЕНОВ (ЦАГИ),
Г.С.ВЕРЕСНИКОВ, Н.А.ЕГОРОВ
В.Г.ЛЕБЕДЕВ, Е.Л.КУЛИДА (ИПУ РАН)
Основные причины авиационных происшествий • Столкновение с землей в управляемом полете (СFIT)); • Потеря управления ВС (сваливание, штопор,…); • Столкновение с другим ВС в воздухе и на земле; • Атмосферные факторы, включая спутный след; • Касание ВПП хвостом, крылом и гондолой двигателя; • Технические неисправности; • и др. ~ 75-80% АП происходят на этапах взлета, набора высоты, предпосадочного маневрирования и посадки; ~ 75-80% АП связано с «человеческим фактором».

Основные направления повышения
безопасности полета
• Автоматизация управления ВС;
• Расширение набора ограничителей параметров движения;
• Повышение надежности;
• Улучшение информационной осведомленности экипажа
(информационное поле - форматы дисплеев, предупреждения,
связь,…);
• Повышение траекторной безопасности (системы предупреждения,
взаимодействие с УВД и другими ВС, ограничители траекторных
параметров, интегрированная система траекторной безопасности);
• Системы поддержки принятия решения (интеллектуальные системы
оценки летной ситуации, формирование рекомендаций,…);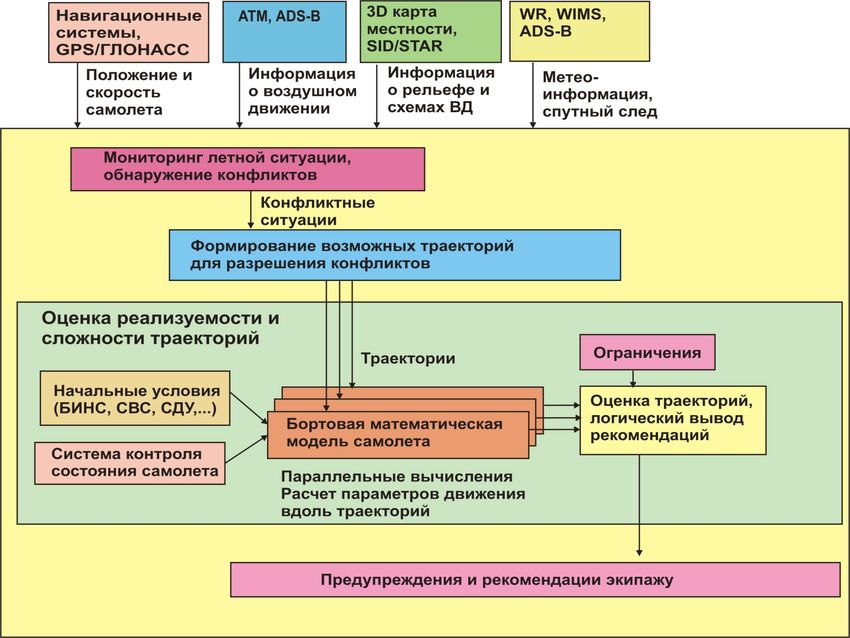
Функции предупреждения и
ограничения
АСШУ-КСУ-САУ:
• Ограничение нормальной перегрузки, угла атаки,
углов тангажа и крена, приборной скорости и
числа Маха,…
• Совмещенное управление угловым положением и
траекторными параметрами;
Бортовое оборудование:
• функции предупреждения (T)CAS, T)AWS, ACAS,
WR, WIMS, GPWS, ACAS, СПКР, СППЗ,…);
• в ближайшем будущем – выход на управление
для разрешение конфликтов.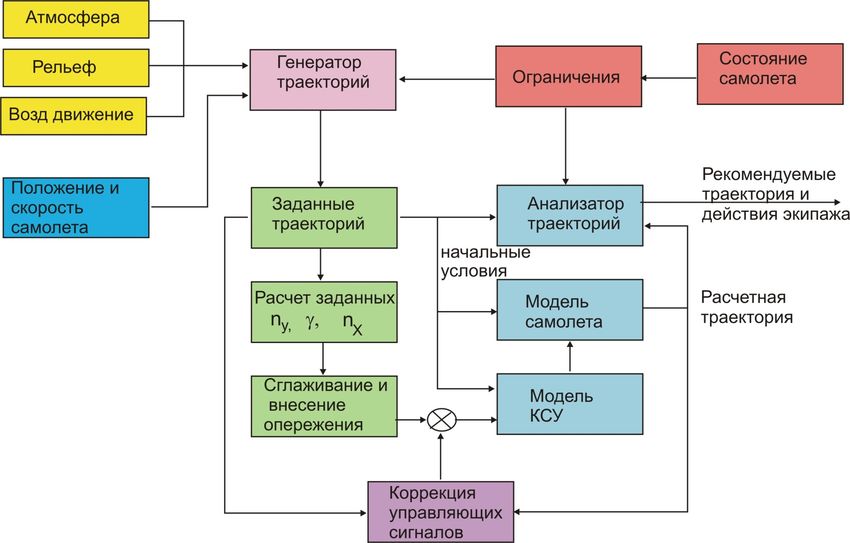
Система траекторной безопасности
(обобщенная)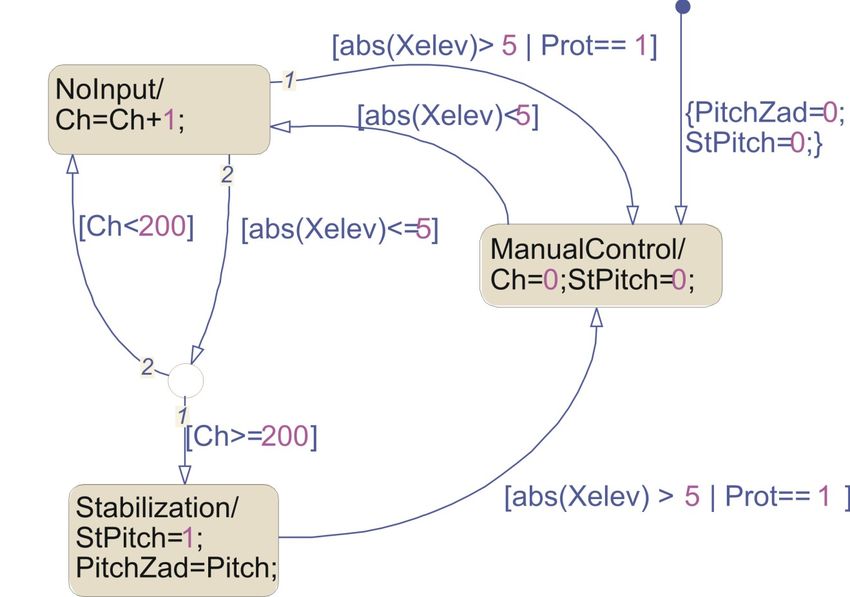
Функции интегрированной системы мониторинга
летной ситуации и обеспечения траекторной
безопасности полёта
- оценка летной ситуации и прогноз её развития на основе
математического моделирования;
- обнаружение конфликтных ситуаций. Анализируется
конфликтность траектории с рельефом, участниками
воздушного движения и атмосферными явлениями;
- расчёт и генерация возможных траекторий разрешения
конфликтов для текущего состояния и конфигурации
самолета. Методы и средства ИПУ РАН;
- определение параметров и сортировка траекторий в
соответствии с выбранной системой приоритетов;
- выполнение виртуальных полётов вдоль траекторий в
режиме быстрее реального времени с использованием
математической модели самолёта;
- анализ виртуальных полётов, выбор лучшей из реализуемых
траекторий и представление её экипажу для реализации.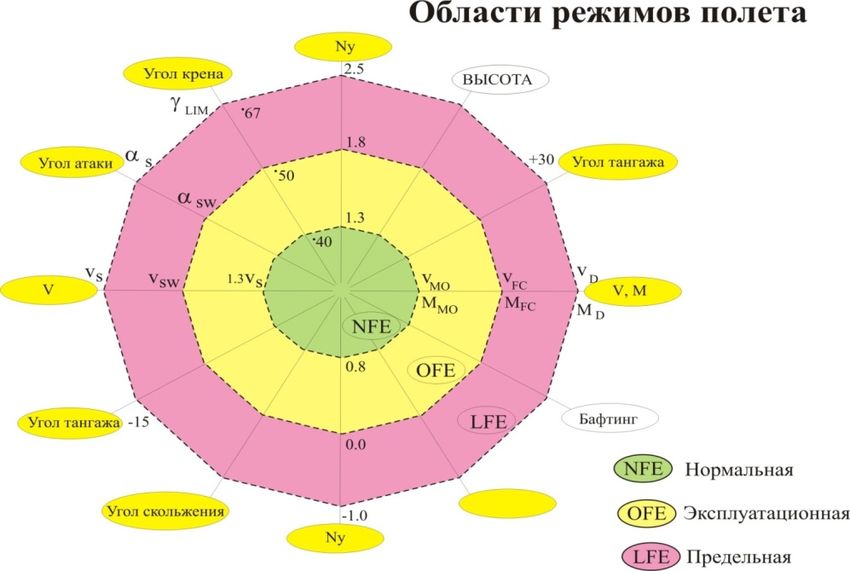
Математическая модель самолета
Функции комплексной системы
управления - КСУ
Функции управления:
- формирование сигналов управления по тангажу, крену и курсу от рычагов
управления и переключателей;
- обеспечение удовлетворительных характеристик устойчивости и
управляемости самолета во всем эксплуатационном диапазоне режимов
полета в соответствии с нормами лётной годности самолётов транспортной
категории, таких как АП-25 и FAR-25.
Функции защиты диапазона параметров полета:
- функции ограничения и предупреждения (угол атаки, нормальная перегрузка,
число Маха, приборная скорость, углы тангажа и крена);
Комфортные функции:
автоматическая балансировка самолёта в продольном канале;
– стабилизация углового положения самолета при отсутствии вмешательства
летчика в управление;
– автоматическое парирование возмущающих моментов, возникающих при
отказе двигателя;
– компенсация возмущающих моментов при изменении положения механизации
крыла и тяги двигателей;
– автоматическая координация самолёта в вираже;
– и др.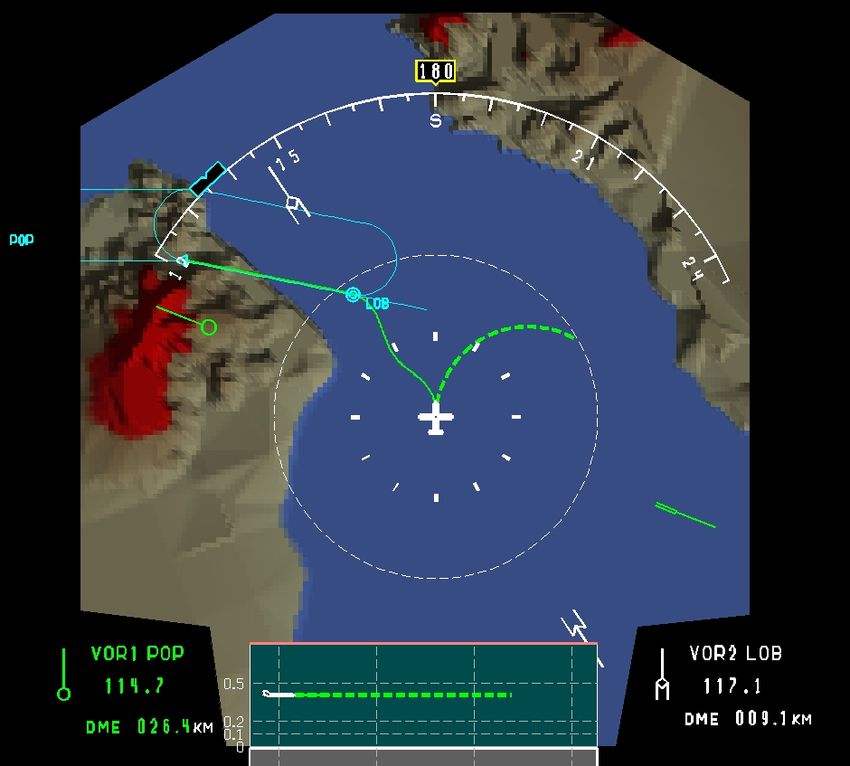
Стабилизация крена. Алгоритм представлен в виде конечного автомата.
Заданная управляемость по перегрузке и стабилизация тангажа
Ограничитель по перегрузке и углу
тангажа (Н=11000, М=0.75)Ограничитель угла атаки и угла тангажа (Н=11000, М=0.6)
Ограничитель перегрузки и приборной скорости
Ограничитель перегрузки и числа Маха
Формирование траектории (ИПУ)
- использование
прецедентного подхода;
оптимизация на графах;
сглаживание траектории с
учетом маневренных
возможностей самолета;
формирование 3D
траектории с учетом
нескольких препятствий.Формирование безопасных траекторий с
учетом рельефа местностиФормирование безопасных траекторий с
учетом динамических зон неблагоприятных
атмосферных условийБлок отработки заданных траекторий
Параметры полета
Внесение опережения в заданный
сигнал
N N
c X i зад (( n i)T0 ) c i zi
Х ком (nT0 ) i 0
N
Z ( Х ком ) W ( z ) Z ( X зад ) i 0
N
Z( X зад )
c i c i 0
i
i 0Коррекция по рассогласованию с
траекторией
K
n yзза n yкко KV y (1 ) (Vyзза Vyзза Vy ),
s
Vyзза K H ( H зад H ).Matlab/Simulink модель блока отработки
заданной траектории
8
dny_T) rj
[T)ime_T) rj]
T)ime dNy _T)rj dNy _T)rj
Subsystem dNy _com 1
6 Vcas dny_command
Vcas
[Vyg] Vy g
Vy T)rj
Vy sum 2
Vyg T)rj Vy_sum
[dVy_T)rj] In5
Vy tracking,
dNy command
H trj
dVy com [dVy_T)rj]
H T)rj1 [H] H
T)ime [Xg] X
H sum 3
4 Aoa
[Zg] Z H_sum
AoA_grad 3 Vtas
Vtas AoA-Vtas H tracking,
Vy command
[Xtrj]
X T)rj2
5
X T)rj [Xg] X_sum
[Ztrj ]
[Vxg]
Z T)rj1
6
2 [Vyg] Z T) rj [Zg] Z_sum
Vxyzg
[Vzg]
[Vxg_trj]
[Xg] Vxg T) rj
1 [H] [Vzg_trj]
XYZg
Vzg T) rj 5
[Zg]
Bank_grad
Bank_com
4
T)ime Bank_sum
Bank_trj
Subsystem1
Bank1
[Xg]
[Zg]
Bank trj Bank com 7
[Vxg] Bank_com
[Vzg]
Interpreted [T) ime_T) rj]
dBank trj T)ime trj
[Xtrj] MAT)LAB Fcn
[Ztrj ] Lateral Subsystem 2
T)rajectory
[Vxg_trj]
T) racking
[Vzg_trj]Анализ приемлемости траекторий по принадлежности к области полета
Анализатор реализуемости траекторий.
Анализируемые события.
• Траектория отрабатывается с заданной точностью;
• Параметры траектории лежат внутри:
– нормальной области;
– эксплуатационной области;
– предельной области;
• самолет не в состоянии отработать заданную траекторию –
ошибки отработки превышают допустимые пределы;
• самолет выходит на ограничения по отклонению поверхностей
управления или на ограничения по тяге или режиму работы
двигателя;
• параметры полета остаются внутри предельной области, но
происходит столкновение с земной поверхностью;
• параметры полета выходят за границы предельной области.Общая структура стенда ИПУ
Шаг 1 – формирование траекторий
Шаг 2 – предварительный отбор.
Параметры траектории определяются с помощью
трехгранника ФренеШаг 3 – выполнение виртуальных
полетовШаг 4 – выбор рекомендуемой траектории
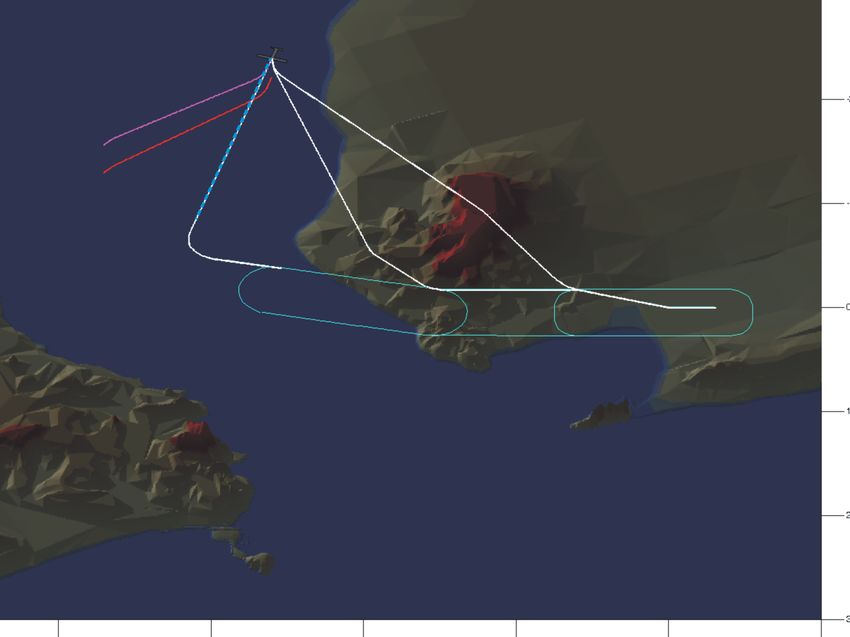
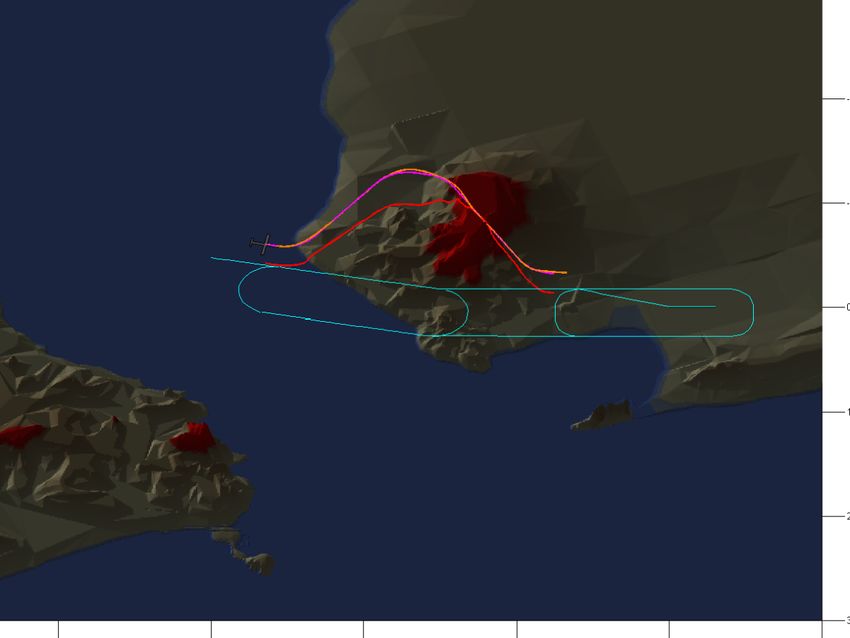
Индикация обстановки на 2 ½D навигационном дисплее
Облет зоны неблагоприятных погодных условий. Успешный облет сбоку.
Попытка облета сверху зоны неблагоприятных
погодных условий.
Нет ограничителей – сваливание и штопор.12000 2.5
11500 2
1.5
11000
1
10500
0.5
Ny1
10000 Высота заданная
0 Ny траекторное
Высота
Ny зад АСШУ
9500 -0.5
9000 -1
0 10 20 30 40 50 60 70 80 90 100 0 10 20 30 40 50 60 70 80 90 100
25 2
20 Угол атаки, град
Тангаж
15 Stop Simulation
1
10
5
0 0
0 10 20 30 40 50 60 70 80 90 100 0 20 40 60 80 100Попытка облета сверху зоны неблагоприятных
погодных условий.
Есть ограничитель угла атаки – парашютирование.Направления дальнейших работ • Увеличение быстродействия – распараллеливание вычислений, использование линий связи для обмена; • Совершенствование мат. модели самолета; • Переход на реальные схемы движения в аэропорту – схемы STAR; • Совершенствование алгоритмов синтеза траекторий с учетом схем захода на посадку, управления скоростью и конфигурацией самолета; • Использование 2 1/2D дисплеев (пилотажных и навигационных); • Использование более детальных моделей разных атмосферных явлений и сигналов их измерительных систем; • Интеграция в систему КБО и КСУ; • Создание демонстратора и стендовая отработка с летным составом.
Спасибо за внимание!
Вы также можете почитать