Оценка эффективности алгоритмов фильтрации вектора состояния малоразмерного объекта наблюдения при аппроксимации траектории его перемещения ...
←
→
Транскрипция содержимого страницы
Если ваш браузер не отображает страницу правильно, пожалуйста, читайте содержимое страницы ниже
Российский технологический журнал. 2021;9(4):38–48 ISSN 2500-316X
Современные радиотехнические и телекоммуникационные системы
Modern radio engineering and telecommunication systems
УДК 621.396.969.181.234
https://doi.org/10.32362/2500-316X-2021-9-4-38-48
НАУЧНАЯ СТАТЬЯ
Оценка эффективности алгоритмов фильтрации
вектора состояния малоразмерного объекта
наблюдения при аппроксимации траектории его
перемещения немарковским процессом
Б.А. Заикин 1, @,
А.Ф. Котов 2
1Городская клиническая больница им. М.Е. Жадкевича, Москва, 121374 Россия
2МИРЭА – Российский технологический университет, Москва, 119454 Россия
@ Автор для переписки, e-mail: halfmazerkin@gmail.com
Резюме. В статье рассматриваются возможности оценивания векторов состояния объектов наблюдения,
аппроксимация траекторий перемещений которых не является марковской. Во введении обсуждается сле-
дующая проблема: использование аппроксимации марковскими процессами траектории объекта наблю-
дения в некоторых случаях может приводить к расхождению теории и практики. Это происходит, напри-
мер, в случае радиосистем координатометрии, работающих на малых дистанциях с объектами, у которых
траекторные флуктуации сопоставимы с размерами самого объекта наблюдения. В первой части статьи
проведено моделирование траекторий малоразмерных объектов наблюдения при аппроксимации траек-
тории марковским процессом и указаны ограничения такого подхода. Предложено использование много-
мерного гауссова закона распределения для порождения траектории малоразмерного объекта наблюде-
ния, который, с одной стороны, более точно моделирует поведение объекта, а с другой – требует больших
вычислительных затрат. Во второй части проведено исследование точностных характеристик однопозици-
онной угломерно-дальномерной и трехпозиционной дальномерной радиосистем. В качестве алгоритмов
оценивания в данных системах при моделировании использованы алгоритмы α−β, Калмана и нелинейного
оценивания. Приведены параметры и характеристики моделирования. Дан критерий оценки качества филь-
трации. В третьей части представлены результаты моделирования процесса оценивания местоположения
объектов наблюдения с траекториями перемещения, аппроксимированными немарковскими процессами.
Представлено подробное описание графиков. Моделирование подтверждает возможность использования
алгоритмов Калмана и нелинейной фильтрации для оценивания траектории малоразмерного объекта на-
блюдения, модель траектории которого использует многомерный нормальный закон распределения. Ука-
зывается, что в ряде случаев ошибки фильтрации превышают ошибки единичного измерения, что приводит
к выводу о необходимости дальнейшей модификации алгоритмов. В заключительной части дается реко-
мендация по дальнейшему уменьшению ошибок оценивания при использовании алгоритмов Калмана и не-
линейного оценивания.
Ключевые слова: немарковская аппроксимация, алгоритм α−β, алгоритм Калмана, нелинейная фильтра-
ция, однопозиционная радиолокация, многопозиционная радиолокация, квадрокоптеры
© Заикин Б.А., Котов А.Ф., 2021
38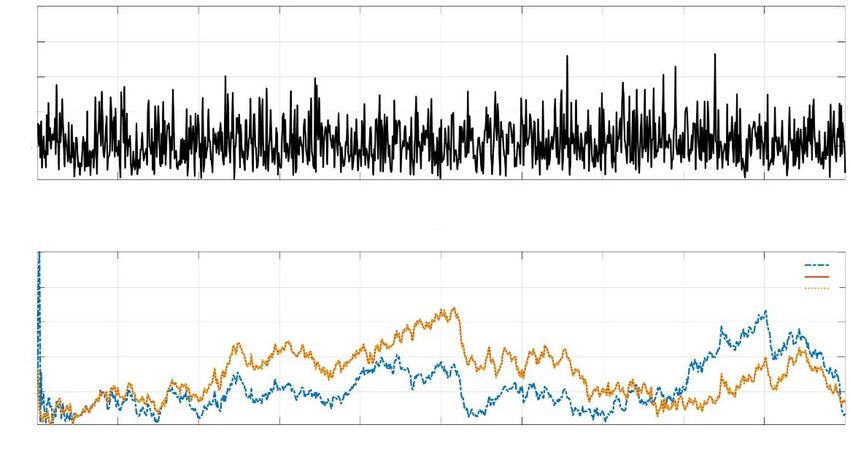
Оценка эффективности алгоритмов фильтрации вектора состояния малоразмерного объекта Б.А. Заикин,
наблюдения при аппроксимации траектории его перемещения немарковским процессом А.Ф. Котов
• Поступила: 18.04.2021 • Доработана: 11.05.2021 • Принята к опубликованию: 25.05.2021
Для цитирования: Заикин Б.А., Котов А.Ф. Оценка эффективности алгоритмов фильтрации вектора состояния
малоразмерного объекта наблюдения при аппроксимации траектории его перемещения немарковским процес-
сом. Российский технологический журнал. 2021;9(4):38−48. https://doi.org/10.32362/2500-316X-2021-9-4-38-48
Прозрачность финансовой деятельности: Никто из авторов не имеет финансовой заинтересованности в
представленных материалах или методах.
Авторы заявляют об отсутствии конфликта интересов.
RESEARCH ARTICLE
An estimation of efficiency of filtering algorithms
of state vector of small-sized observed object
with non-Markovian approximation of trajectory
Boris A. Zaikin 1, @,
Alexander F. Kotov 2
1M.E. Zhadkevich City Clinical Hospital, Moscow, 121374 Russia
2MIREA – Russian Technological University, Moscow, 119454 Russia
@ Corresponding author, e-mail: halfmazerkin@gmail.com
Abstract. The article discusses the possibilities of estimating the states vectors of observation objects with the non-
Markovian approximation of the trajectories. The introduction discusses the problem consisting in the fact that the use of
the approximation of the trajectory of the observed object by Markov processes in some cases can lead to a discrepancy
between theory and practice. In the first section, we simulate the trajectories of observed objects when approximated
by a Markovian process and indicate the limitations of this approach. It is proposed to use a multidimensional Gaussian
distribution law for generating the trajectory of the observed object. In the second section, a study of the accuracy
characteristics of a single-position angular-rangefinder radar and a three-position rangefinder radar are considered.
Algorithms α-β, Kalman and nonlinear estimation are used in the modeling as estimation algorithms in these systems.
The parameters and characteristics of the simulation are given. In the third part, the results of modeling the process of
estimating the location of objects of observation with trajectories of movement approximated by non-Markov processes
are presented. Modeling confirms the possibility of using submitted algorithms to estimate the trajectory of a small-
sized object of observation, a trajectory model of which uses a multidimensional normal distribution law. It is pointed
out that in several cases the filtering errors exceed the errors of a single measurement. This leads to the conclusion that
further modification of the algorithms is necessary. In the final part, a recommendation is given on how to further reduce
the estimation errors when using Kalman algorithms and nonlinear estimation.
Keywords: non-Markovian approximation, α−β algorithm, Kalman algorithm, nonlinear filtering, one-position radar,
multi-position radar, quadcopters
• Submitted: 18.04.2021 • Revised: 11.05.2021 • Accepted: 25.05.2021
For citation: Zaikin B.A., Kotov A.F. An estimation of efficiency of filtering algorithms of state vector of small-sized
observed object with non-Markovian approximation of trajectory. Rossiiskii tekhnologicheskii zhurnal = Russian
Technological Journal. 2021;9(4):38–48 (in Russ.). https://doi.org/10.32362/2500-316X-2021-9-4-38-48
Financial disclosure: Authors have no a financial or property interest in any material or method mentioned.
The authors declare no conflicts of interest.
Российский технологический журнал. 2021;9(4):38–48
39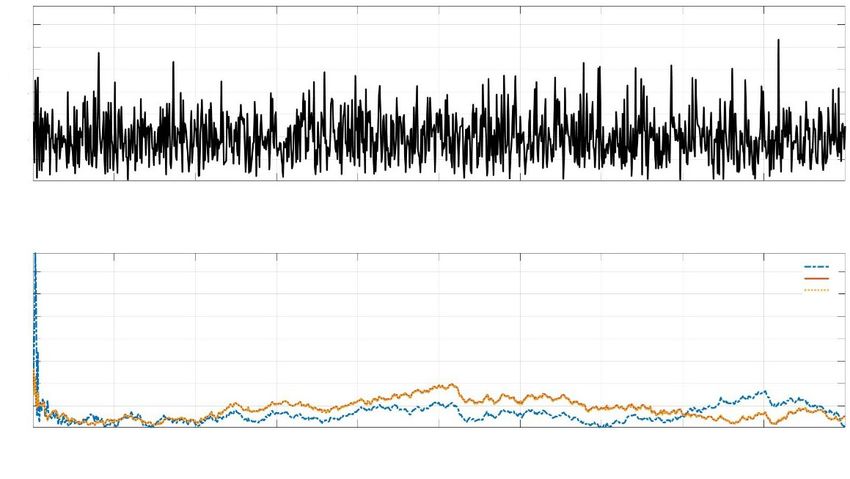
An estimation of efficiency of filtering algorithms of state vector Boris A. Zaikin,
of small-sized observed object with Non-Markovian approximation of trajectory Alexander F. Kotov
ВВЕДЕНИЕ теории оценивания с применением аппроксимации
марковскими процессами. Интерес представляет не
Как известно, любая математическая модель только потенциальная возможность использования
базируется на тех или иных допущениях. Если опу- «классических» алгоритмов в «неклассических»
стить факт несовершенства общей физической тео- условиях, но и последующая возможность оптими-
рии, то большинство моделей будет балансировать зации для уменьшения погрешности фильтрации и
между приближенностью к реальности и сложно- оценка эффективности оптимизированных алгорит-
стью вычисления. Однако такой подход не может га- мов. С другой стороны, марковская аппроксимация
рантировать получения достоверного результата при использовалась и используется до сих пор, посколь-
использовании моделей. ку в теоретическом плане она позволяет получать
Применительно к радиотехническим и ради- законченный математический аппарат, хотя ряду
олокационным областям при синтезировании ал- исследователей она кажется весьма грубой, не со-
горитмов оценивания одним из подобных широко ответствующей реалиям. И поэтому неудивительно,
используемых допущений является то, что процесс, что имели место попытки использовать немарков-
отражающий изменение во времени вектора состоя- скую аппроксимацию как более подходящую [3−5].
ния объекта наблюдения (ОН), обладает свойствами Но эти попытки, как правило, приводили к получе-
марковского процесса. Подобное допущение позво- нию достаточно сложного математического аппара-
ляет получить достаточно простой математический та, который по существу являлся той или иной мо-
аппарат. Несмотря на то, что формально доказать дификацией марковской аппроксимации. И только с
такое утверждение представляется нетривиальной появлением современных ЭВМ, позволяющих моде-
задачей, требующей наблюдений за большим чис- лировать сложные процессы, немарковская аппрок-
лом различных объектов и большим количеством симация, возможно, найдет применение при имита-
их траекторий и маневров, на практике при исполь- ционном моделировании.
зовании синтезированных алгоритмов допущение В качестве объектов наблюдения (ОН) в данной
марковости процесса в большинстве случаев дает работе используются квадрокоптеры – беспилотные
хорошие результаты. Более того, аргументом в поль- летательные аппараты, обладающие повышенной
зу использования в радиолокации марковских про- маневренностью и малыми размерами. В качестве
цессов в качестве моделей является то, что истори- радиотехнических систем координатометрии – ох-
чески в качестве объектов наблюдения выступали ранные радиосистемы, действующие на малой даль-
массивные инертные объекты – самолеты, корабли, ности и использующие большое число импульсов
дирижабли и т.д. Также стоит отметить, что в боль- на фиксированном интервале наблюдения. Наконец,
шинстве случаев рассматривались дальнодействую- в качестве алгоритмов оценивания в данной работе
щие импульсные системы, которые, соответственно, выступают алгоритм α−β [6], алгоритм фильтрации
используют относительно невысокое количество Калмана [7] и модифицированный алгоритм не-
импульсов (или пачек импульсов при когерентном линейной фильтрации, представленный в [8] и [9],
приеме) принимаемого сигнала на фиксированном именуемый далее для краткости алгоритмом нели-
интервале наблюдения. Однако в дальнейшем, с нейной фильтрации.
развитием научно-технического прогресса появи-
лись, с одной стороны, радиотехнические системы 1. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ТРАЕКТОРИИ
координатометрии, работающие на малой дальности МАЛЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ
с большим числом импульсов за интервал наблю- АППАРАТОВ
дения, а с другой стороны возникла необходимость
вести наблюдения за такими объектами, как беспи- В большинстве работ ([6, 8−12] и др.), в которых
лотные летательные аппараты, обладающие мень- рассматривается функционирование алгоритмов
шей инертностью, повышенной маневренностью и фильтрации в различных радиотехнических систе-
малыми размерами [1, 2]. Кроме того, вычислитель- мах координатометрии, акцент делается либо на рас-
ные возможности ЭВМ постоянно возрастают и по- смотрение геометрического построения системы,
зволяют с помощью моделирования решать все бо- либо на модификацию непосредственно алгоритмов.
лее сложные математические задачи. В связи с этим Вопрос анализа траекторий объекта наблюдения
возникает необходимость пересмотра упомянутого и математического аппарата, стоящего за ним, во
выше подхода. многих случаях считается тривиальным и либо не
Целью данной работы является рассмотрение ал- рассматривается, либо рассматривается для очень
горитмов фильтрации, основанных на тех представ- узких случаев без излишних подробностей. Однако
лениях, что оценивание векторов состояния объектов при решении некоторых радиолокационных задач
наблюдения будет выходить за рамки классической (например, при оценивании векторов состояния
Russian Technological Journal. 2021;9(4):38–48
40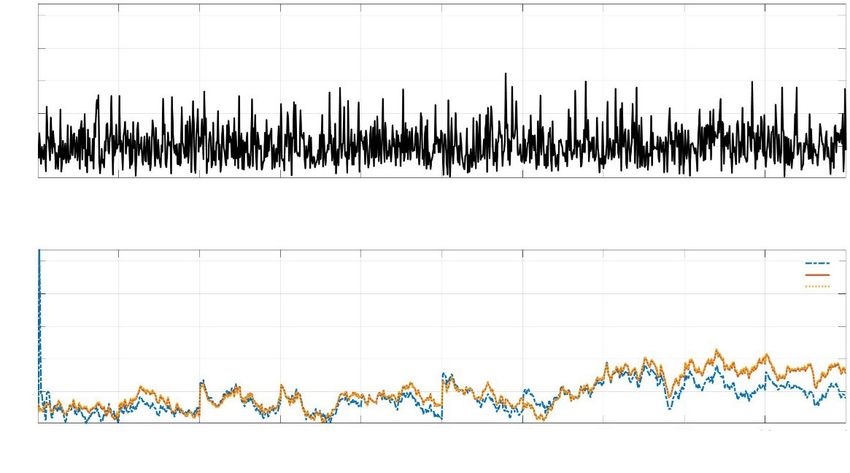
Оценка эффективности алгоритмов фильтрации вектора состояния малоразмерного объекта Б.А. Заикин,
наблюдения при аппроксимации траектории его перемещения немарковским процессом А.Ф. Котов
объектов наблюдения в радиолокационных системах флуктуаций не вставал остро по причине относи-
с ограниченной дальностью действия) приходится тельной медленности функционирования систем
иметь дело с объектами, перемещение которых до- измерения и больших размеров объектов, которые
статочно специфично и требует дополнительного были несоизмеримо больше самих флуктуаций.
анализа. Поэтому представляется целесообразным Таким образом, приближение в виде марковской
внимательнее рассмотреть математическое описа- последовательности давало хорошее соответствие
ние изменения вектора состояния малоразмерного теории и практики. Однако появление таких объек-
объекта наблюдения. тов, как квадрокоптеры, может приводить к траек-
В большинстве случаев, траекторию объекта на- торным флуктуациям, сопоставимым по размерам
блюдения можно описать с помощью рекуррентного с самим объектом наблюдения, а системы их могут
соотношения: обладать значительно более высокой частотой сле-
дования импульсов.
(1) Предположим, что среднеквадратичное откло-
нение траекторных флуктуаций для квадрокоптера
где Λ ( ν) – вектор состояния ОН в ν-й момент време- составляет bx1s = 1 м за 1 с; частота следования
импульсов радиосистемы, сопровождающей этот
ни; Φ – матрица перехода; Λ ( ν−1) – вектор состояния
ОН в (ν – 1)-й момент времени; B – матрица фор- объект наблюдения, составляет n = 1000 импуль-
мирующих воздействий, состоящая из среднеква- сов в секунду. Ограничим время наблюдения 1 се-
дратических отклонений траектории по различным кундой. Необходимо определить траекторию в ин-
тервале 1000 точек, который соответствует
координатам; N ( ν) – гауссовский случайный вектор
интервалу наблюдения 1 с. Если мы используем
с нулевым математическим ожиданием и единичной
марковскую модель флуктуаций (2), то встает за-
дисперсией. Отметим, что такое математическое
дача подбора такого СКО bx0.001s, которое соответ-
описание позволяет описывать довольно сложные
ствует изменению траектории за 0.001 с.
траектории, при этом оставаясь в пределах марков-
Рассмотрим два крайних случая: bx0.001s = bx1s
ского приближения. Объект наблюдения в принятой b
модели полагается точечным, поскольку отношение (рис. 1) и bx 0.001s = x1s (рис. 2).
расстояния до объекта к его размеру считается до- n
статочно большим. 4
Математическое описание траекторных флуктуа- 3
ций в виде марковского процесса представляет собой 2
одну из причин несоответствия между теоретической 1
моделью и реальной картиной мира. Чтобы ясно обо-
x, м
0
значить эти возможные несоответствия, рассмотрим
–1
крайний случай вектора состояния, состоящего из
–2
одной величины. Пусть эта величина соответствует
изменению положения объекта наблюдения по оси X. –3
Также, ввиду того, что в данном случае нас интере- –4
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
суют флуктуации, для простоты будем считать, что t, c
Φ = I, где I – единичная матрица. Таким образом, Рис. 1. Траекторные флуктуации марковского
математическое описание изменения вектора состоя- процесса при bx 0.001s = bx1s
ния, согласно (1), будет при данных допущениях вы-
глядеть следующим образом: 0.03
0.02
( ν)
x( ν) = x( ν−1) + bx nx , (2) 0.01
x, м
0
где bx – среднеквадратическое отклонение (СКО)
( ν) –0.01
траекторных флуктуаций по оси X; nx – гауссова
случайная величина с нулевым математическим –0.02
ожиданием M nx { ( ) } = 0 и единичной дисперсией
ν –0.03
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
{ ( ) } = 1.
ν t, c
D nx Рис. 2. Траекторные флуктуации марковского
Как было сказано ранее, в рамках «классиче- bx1s
процесса при bx 0.001s =
ской» радиотехнической теории вид аппроксимации n
Российский технологический журнал. 2021;9(4):38–48
41
An estimation of efficiency of filtering algorithms of state vector Boris A. Zaikin,
of small-sized observed object with Non-Markovian approximation of trajectory Alexander F. Kotov
Как можно видеть из рис. 1 и рис. 2, ни один из вектором математического ожидания M kx и ковариа-
двух вариантов не соответствует действительности.
ционной матрицей COVxk .
В первом случае мы получаем объект, который коле-
В нашем примере k = n = 1000; математические
блется с большой амплитудой и частотой, не соответ-
ствующей реальному движению объекта наблюде- ожидания mxk должны быть нулевыми, т.к. постоян-
ния. Во втором случае мы получаем объект, который ная составляющая входит в первое слагаемое (1) и
колеблется с малой амплитудой, и при этом малове- (2); дисперсии Dxk равны 1 м2. Коэффициент корре-
роятно, что такой процесс будет иметь отклонение в ляции C xij должен уменьшаться с увеличением раз-
1−3 м в интервале, равном 1 секунде (которое мож- ницы между индексами i и j, обеспечивая тем самым,
но ожидать по правилу 3σ). Любой промежуточный связь между импульсами, не позволяющую иметь
вариант также не будет соответствовать реалиям. экстремально быстрые скачки траектории (какие
Можно сделать вывод о непригодности марковской можно видеть на рис. 1). В данной работе рассматри-
модели флуктуаций для рассмотрения данного слу- вается нормированное экспоненциальное убывание.
чая описания движения объекта наблюдения. Таким образом, для нашего примера получаем:
Таким образом, возникает предложение рассмо-
треть иную модель траекторных флуктуаций объ- M kx = [ 0 0…0] , (6)
ектов, подобных квадрокоптеру, при распределении
их значений по многомерному гауссовому закону.
Многомерный гауссов закон распределения предпола- e0.999 e0.998 e0.001
1 …
гает корреляционные связи между компонентами, что e e e
противоречит марковскому представлению о том, что e0.999 e0.999 e0.002
текущее состояние зависит только от предыдущего. 1 …
e e e
Многомерный гауссов процесс может быть задан COVxk = e0.998 e0.999 e0.003 . (7)
вектором математических ожиданий и ковариацион- 1 …
ной матрицей: e e e
… … … … …
M kx = m1x mx2 … mxk , (3) 0.001
e0.002 e0.003
e … 1
e e e
D1x C12x C13x … C1xk
12 На рис. 3 представлен процесс, соответствую-
C x Dx2 C x23 … C x2k
щий (5)–(7). Как видно из этого рисунка, в отличие
COVx = C13
k C x23 Dx3 … C x3k , (4) от рис. 1 и рис. 2, процесс не имеет экстремальных
x
… … … … … скачков за малый отрезок времени и при этом полу-
C1k
x C x2k C x3k … Dxk чается так, что его значения могут колебаться в ин-
тервале исходного СКО bx1s = 1 м за 1 с (иными сло-
где M kx – вектор, состоящий из математических вами, на длинных дистанциях мы получим
отклонение, подчиняющееся правилу 3σ). Исходя
ожиданий mix -го одномерного нормального закона
из требований к объекту наблюдения, в модели мо-
распределения, входящего в многомерный закон рас-
гут использоваться и другие зависимости между
пределения; COVxk – ковариационная матрица мно- отсчетами за счет выбора коэффициента корреля-
гомерного нормального закона распределения; Dxi – ции C xij .
дисперсия i-го нормального закона распределения,
входящего в многомерный закон распределения; 2
C xij – коэффициент корреляции между i-м и j-м нор- 1.5
мальными распределениями, входящими в много-
1
мерный закон; k – мерность закона распределения
(определяет в нашем случае количество импульсов).
x, м
0.5
Уравнение, аналогичное уравнению (2), для дан- 0
ного случая можно представить в виде:
–0.5
(
x( ν) = x( ν−1) + ξ( ν) M kx , COVxk , ) (5) –1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t, c
( )
где ξ( ν) M kx , COVxk – ν-я компонента реализации Рис. 3. Траекторные флуктуации при многомерном
многомерного гауссова случайного процесса с гауссовом законе распределения и bx1s = 1 м
Russian Technological Journal. 2021;9(4):38–48
42Оценка эффективности алгоритмов фильтрации вектора состояния малоразмерного объекта Б.А. Заикин,
наблюдения при аппроксимации траектории его перемещения немарковским процессом А.Ф. Котов
2. ПАРАМЕТРЫ МОДЕЛИРОВАНИЯ
отклонениями измерений временных задержек σ τ ,
И КРИТЕРИЙ КАЧЕСТВА ФИЛЬТРАЦИИ 1
στ , στ .
2 3
Следующим этапом является проверка работо- Для моделирования СКО измерения временной
способности алгоритмов фильтрации при принятой задержки можно определить из формулы потенци-
модели движения. Помимо работоспособности в альной точности [13]:
конкретном случае нас будет интересовать устой-
чивость работы в различных режимах функциони- 1
στ = , (8)
рования разных систем. Для этого в данной работе 2E
проводится моделирование двух радиосистем коор- ∆f c
N0
динатометрии при разных параметрах траекторных
флуктуаций. 2E
Рассмотрим кратко процесс оценивания параме- где Δfc – ширина спектра сигнала; – энергетиче-
N0
тров отраженного от объекта наблюдения радиосиг- ское отношение сигнал/шум (ОСШ).
нала в однопозиционной угломерно-дальномерной СКО измерения пеленгов σβ и σε (азимута и угла
радиосистеме, геометрическое построение которой места) могут быть определены в соответствии с [14,
изображено на рис. 4 и в трехпозиционной дально- 15]. В антенной решетке для карандашного луча ко-
мерной радиосистеме (рис. 5). Импульсный радио- личество излучающих элементов N связано с шири-
дальномер, расположенный в точке 0 (рис. 4), изме- ной луча θ0.5 на уровне 0.5 по мощности выражени-
ряет время τ распространения сигнала до объекта ем [14]:
наблюдения и обратно . Система также обладает пе-
100
ленгаторами, которые измеряют азимут β и угол ме- θ0.5 = . (9)
ста ε. Соответственно, система может быть охарак- N
теризована среднеквадратическим отклонением
измерений временной задержки στ, азимута σβ и угла С помощью формулы (9) могут быть определены
места σε. На практике эти величины определяются σβ и σε, согласно графикам, которые были построены
техническими характеристиками конкретной радио- П. Сверлингом [15]. График представляет собой за-
системы. N
висимость произведения σβ / ε от отношения
На рис. 5. показаны объект наблюдения (ОН), при- θ0.5
емные пункты радиосистемы П1, П2 и П3, а также сигнал/шум (ОСШ) в дБ для флуктуирующего и не
пункт обработки информации ПОИ. Радиосистема яв- флуктуирующего объекта наблюдения. Таким обра-
ляется импульсной и на каждом шаге измеряет времен- зом, задаваясь числом излучающих элементов N,
ные задержки τ1, τ2, τ3, которые характеризуют распро- можно определить σβ и σε для различных значений
странение сигнала от пунктов П1, П2, П3 до ОН и ОСШ.
обратно, соответственно. Затем информация о задерж- Синтез указанных алгоритмов оценивания в
ках передается в пункт обработки информации (ПОИ), данных радиосистемах подробно рассмотрен во
находящийся в точке 0. Соответственно, система мо- многих работах, к примеру в [9]. Для алгоритма
жет быть охарактеризована среднеквадратическими α−β в качестве соответствующих коэффициентов
Z Z
Y
Y
z
z
R
y
y
a
X
X x
b/2 b/2
x
Рис. 4. Геометрическое построение Рис. 5. Геометрическое построение
однопозиционной угломерно-дальномерной трехпозиционной дальномерной радиосистемы
радиосистемы координатометрии координатометрии
Российский технологический журнал. 2021;9(4):38–48
43An estimation of efficiency of filtering algorithms of state vector Boris A. Zaikin,
of small-sized observed object with Non-Markovian approximation of trajectory Alexander F. Kotov
используются соотношения, зависящие от итерации между истинными значениями координат и значе-
и представленные в [13]. ниями, полученным с помощью алгоритмов оцени-
Исходным значением отношения сигнал/шум вания:
примем значение, равное 10 дБ. При этом ширина
( x( ) − xˆ( ) ) + ( y( ) − yˆ( ) ) + ( z( ) − zˆ( ) ) . (8)
спектра принимаемого сигнала Δfs = 109 Гц. Таким 2 2 2
d ( ν) = ν ν ν ν ν ν
образом, согласно (8), στ = 3.162−10 с. Размер ан- e e e
тенной решетки примем 20 на 20 элементов, что
в сумме дает число элементов решетки N = 400. где x(ν), y(ν), z(ν) – истинные координаты объекта на-
Согласно (9) и графикам П. Сверлинга [15] получаем ( ν) ( ν) ( ν)
блюдения; xˆe , yˆe , zˆe – координаты, получен-
σβ = σε = 0.0157 рад. Период следования импульсов
ные при использовании процедуры оценивания.
при моделировании примем Tr = 0.001 c, время на-
Далее в тексте данной работы такое расстояние бу-
блюдения Tobs = 1 с, при этом число импульсов за
дет называться ошибкой.
время наблюдения составляет n = 1000. Объект на-
блюдения (которым в охранных радиосистемах мо-
жет быть квадрокоптер, вертолет, аэростат и т.д.) в 3. ПРОВЕРКА РАБОТОСПОСОБНОСТИ
начальный момент времени находится на расстоянии АЛГОРИТМОВ ФИЛЬТРАЦИИ
R(1) = 1500 м, при этом β(1) = 45° и ε(1) = 45°. Таким ПРИ ИСПОЛЬЗОВАНИИ ТРАЕКТОРНОЙ
образом, можно выразить декартовы координаты МОДЕЛИ С ФЛУКТУАЦИЯМИ,
объекта наблюдения x(1) = y(1) = 750 м; z(1) = 1061 м. РАСПРЕДЕЛЕННЫМИ ПО МНОГОМЕРНОМУ
Как и ранее, в работе матрица Φ = I, что соответству- НОРМАЛЬНОМУ ЗАКОНУ
ет равномерному прямолинейному движению, т.е.
движению квадрокоптера на некоторых интервалах Рассмотрим результаты моделирования процес-
наблюдения. В данной работе упор делается на рас- са фильтрации в указанных системах при принятых
смотрение влияния траекторных флуктуаций, одна- значениях.
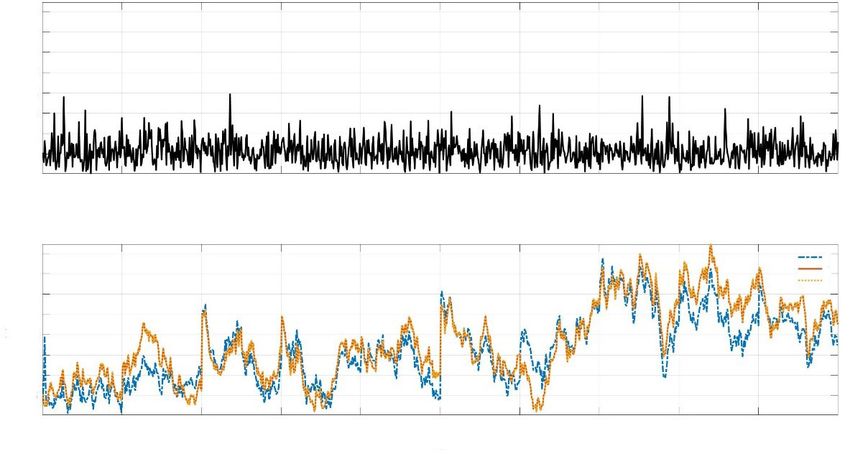
ко модель может быть усложнена для рассмотрения Из рис. 6 видно, что оценивание с использова-
конкретных объектов наблюдения и совершаемых нием алгоритмов α−β, Калмана (б) и нелинейной
ими маневров. фильтрации позволяет значительно снизить ошибки
Для обобщенной оценки ошибки фильтрации по относительно оценивания по единичным измерени-
трем координатам можно рассматривать расстояние ям, т.е. по одному импульсу.
7
6
5
d(n), м
4
3
2
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t, c
(a)
7 1
2
6 3
5
d(n), м
4
3
2
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t, c
(б)
Рис. 6. Ошибки оценивания в однопозиционной радиосистеме при bx1s = by1s = bz1s = 1 м: (а) – единичные
измерения; (б) – фильтрация α−β (синяя штриховая линия), фильтрация Калмана (оранжевая линия),
нелинейная фильтрация (пунктирная желтая линия, совпадает с фильтрацией Калмана)
Russian Technological Journal. 2021;9(4):38–48
44Оценка эффективности алгоритмов фильтрации вектора состояния малоразмерного объекта Б.А. Заикин,
наблюдения при аппроксимации траектории его перемещения немарковским процессом А.Ф. Котов
На рис. 7 видна тенденция, аналогичная рис. 6, од- С уменьшением СКО траекторных флуктуа-
нако здесь преимущество фильтрации перед единичным ций до 0.1 м за 1 с однопозиционная радиосистема
оцениванием не столь явно, т.к. имеют место выбросы, по-прежнему показывает хорошие результаты, вы-
сопоставимые с ошибками единичных измерений. раженные в уменьшении ошибки оценивания.
2.5
2
1.5
d(n), м
1
0.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t, c
(a)
2.5
1
2
2 3
1.5
d(n), м
1
0.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t, c
(б)
Рис. 7. Ошибки оценивания в трехпозиционной радиосистеме при bx1s = by1s = bz1s = 1 м: (а) – единичные
измерения; (б) – фильтрация α−β (синяя штриховая линия), фильтрация Калмана (оранжевая линия),
нелинейная фильтрация (пунктирная желтая линия, совпадает с фильтрацией Калмана)
10
8
d(n), м
6
4
2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t, c
(a)
10 1
2
3
8
d(n), м
6
4
2
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t, c
(б)
Рис. 8. Ошибки оценивания в однопозиционной радиосистеме при bx1s = by1s = bz1s = 0.1 м:
(а) – единичные измерения; (б) – фильтрация α−β (синяя штриховая линия), фильтрация Калмана (оранжевая
линия), нелинейная фильтрация (пунктирная желтая линия, совпадает с фильтрацией Калмана)
Российский технологический журнал. 2021;9(4):38–48
45An estimation of efficiency of filtering algorithms of state vector Boris A. Zaikin,
of small-sized observed object with Non-Markovian approximation of trajectory Alexander F. Kotov
4
3.5
3
2.5
d(n), м
2
1.5
1
0.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t, c
(a)
4 1
3.5 2
3
3
2.5
d(n), м
2
1.5
1
0.5
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
t, c
(б)
Рис. 9. Ошибки оценивания в трехпозиционной радиосистеме при bx1s = by1s = bz1s = 0.1 м: (а) – единичные
измерения; (б) – фильтрация α−β (синяя штриховая линия), фильтрация Калмана (оранжевая линия),
нелинейная фильтрация (пунктирная желтая линия, совпадает с фильтрацией Калмана)
Трехпозиционная угломерно-дальномерная ради- следует отметить, что у фильтрации Калмана и нели-
осистема при условии, что СКО траекторных флук- нейной фильтрации появляются неопределенные па-
туаций достигают 0.1 м за 1 с, показывает плохие ре- раметры – алгоритмические СКО траекторных флук-
зультаты для фильтрации, уступающие единичному туаций bxal, byal, bzal. При марковской аппроксимации
оцениванию. Это свидетельствует о необходимости использовались СКО траекторных флуктуаций bx, by,
модификации алгоритмов. В случае однопозицион- bz, которые порождали траектории и которые исполь-
ной дальномерной радиосистемы модификация алго- зовались в качестве параметров для синтеза алгорит-
ритма возможно способна улучшить результат. мов. Что касается соответствующего подбора параме-
тров, то ввиду того, что параметры перестают быть
ЗАКЛЮЧЕНИЕ аналитически определенными, остается возможность
определить их эмпирически и проверить устойчи-
Как видно из графиков, в целом классические вость процесса фильтрация к изменению других па-
алгоритмы работают и в неклассических условиях, раметров функционирования радиосистем и объекта
т.е. их применение в случае немарковской аппрокси- наблюдения, таких как дальность, ОСШ и др.
мации траекторных флуктуаций возможно. Однако в
Вклад авторов. Все авторы в равной степени
некоторых случаях (к примеру, на рис. 9) фильтрация внесли свой вклад в исследовательскую работу.
при немарковской аппроксимации получается менее Authors’ contribution. All authors equally contributed
точной, чем единичное оценивание. Тем не менее, to the research work.
СПИСОК ЛИТЕРАТУРЫ REFERENCES
1. Melinger D.W. Trajectory Generation and Control for 1. Melinger D.W. Trajectory Generation and Control for
Quadrotors: thesis. Degree of Doctor of Philosophy Quadrotors: thesis. Degree of Doctor of Philosophy
(PhD). University of Pennsylvania: Publicly Accessible (PhD). University of Pennsylvania: Publicly Accessible
Penn Dissertations; 2012. 137 p. URL: https://repository. Penn Dissertations; 2012. 137 p. Available from URL:
upenn.edu/edissertations/547 https://repository.upenn.edu/edissertations/547
2. Ritchie M.A., Fioranelli F., Griffiths H., Torvik B. Monostatic 2. Ritchie M.A., Fioranelli F., Griffiths H., Torvik B. Monostatic
and bistatic radar measurements of birds and micro-drone. and bistatic radar measurements of birds and micro-drone.
In: IEEE Radar Conference (RadarConf). 2016, p. 1−5. In: IEEE Radar Conference (RadarConf). 2016, p. 1−5.
https://doi.org/10.1109/RADAR.2016.7485181 https://doi.org/10.1109/RADAR.2016.7485181
Russian Technological Journal. 2021;9(4):38–48
46Оценка эффективности алгоритмов фильтрации вектора состояния малоразмерного объекта Б.А. Заикин,
наблюдения при аппроксимации траектории его перемещения немарковским процессом А.Ф. Котов
3. Королев А.Н., Котов А.Ф., Ярошевская К.Ш. Филь- 3. Korolev A.N., Kotov A.F., Yaroshevskaya K.Sh. Filtering Non-
трация немарковских процессов. В сб.: Докл. 19 Все- Markovian process. In: 19 Vsesouzn. NMS “Teoriya i proektirovanie
союзн. НМС. Теория и проектирование радиосистем. radiosistem”: sb. dokladov (Report to the All-Union NMS. Theory
Л.: ЛЭТИ; 1985. and practice). Leningrad: LETI; 1985. (in Russ)
4. Королев А.Н., Котов А.Ф., Ярошевская К.Ш. Филь- 4. Korolev A.N., Kotov A.F., Yaroshevskaya K.Sh.
трация немарковских процессов. Радиотехника. Filtering Non-Markov processes. Radiotekhnika =
1990;5:48. Radioengineering. 1990;5:48 (in Russ.).
5. Королев А.Н., Котов А.Ф., Ярошевская К.Ш. Филь- 5. Korolev A.N., Kotov A.F., Yaroshevskaya K.Sh. Filtering
трация немарковского процесса при полигауссовской Non-Markov process with poly-Gasussian approximation.
аппроксимации. В сб.: «Математика. Компьютер. In: Mezhdunarodnaya konferentsiya “Matematika.
Управление и инвестиции»: тезисы докладов между- Komp’yuter. Upravlenie i investitsii” (Abstracts of the
нар. конф. М.: ЦНИИПРОЕКТ; 1993. C. 45. reports of the International Conference Mathematics.
6. Tenne D., Singh T. Characterizing performance of a-b-g Computer. Management and Investment). Moscow:
filters. IEEE Transactions on Aerospace and Electronic TsNIIPROEKT; 1993, p. 45. (in Russ.).
Systems. 2002;38(3):1072−1087. https://doi.org/10.1109/ 6. Tenne D., Singh T. Characterizing performance of a-b-g
TAES.2002.1039425 filters. IEEE Transactions on Aerospace and Electronic
7. Kalman R.E. A new approach to linear filtering and Systems. 2002;38(3):1072−1087. https://doi.org/10.1109/
prediction problems. Transactions of the ASME. Journal TAES.2002.1039425
of Basic Engineering. 1960;82(Series D):35−45. https:// 7. Kalman R.E. A new approach to linear filtering and
doi.org/10.1115/1.3662552 prediction problems. Transactions of the ASME. Journal
8. Гребенников В.Б., Котов А.Ф. Импульсные многопо- of Basic Engineering. 1960;82(Series D):35−45. https://
зиционные радиотехнические системы. Радиотехни- doi.org/10.1115/1.3662552
ка. 1987;6:6−9. 8. Grebennikov V.B., Kotov A.F. Pulse multi-position radio
9. Арешин Я.О., Заикин Б.А., Котов А.Ф., Решетняк С.А. engineering systems. Radiotekhnika = Radioengineering.
Алгоритм нелинейной фильтрации координат мало- 1987;6:6−9 (in Russ.).
подвижного объекта в двухпозиционной радиосисте- 9. Areshin Y.O., Zaikin B.A., Kotov A.F., Reshetnyak S.A.
ме. Радиотехника и электроника. 2019;64(3):213−219. Algorithm for nonlinear filtering of the coordinates of
https://doi.org/10.1134/S0033849419020013 a fluctuating object in a bistatic radio system. Journal of
10. Kumar R.S.R., Ramaiah M.V., Kumar J.R. Performance Communications Technology and Electronics. 2019;64(3):
comparison of α-β-γ filter and kalman filter for CA, 187−192. https://doi.org/10.1134/S1064226919020013
NCA target tracking using bistatic range and range rate [Areshin Ya.O., Zaikin B.A., Kotov A.F., Reshetnyak S.A.
measurements. In: IEEE International Conference on Algoritm nelineinoi fil’tratsii koordinat malopodvizhnogo
Communication and Signal Processing (ICCSP). 2014, p. ob’’ekta v dvukhpozitsionnoi radiosisteme. Radiotekhnika
1462−1466. https://doi.org/10.1109/ICCSP.2014.6950091 i elektronika = Journal of Communications Technology
11. Petsios M.N., Alivizatos E.G., Uzunoglu N.K. and Electronics. 2019;64(3):213−219 (in Russ.).]
Maneuvering target tracking using multiple bistatic 10. Kumar R.S.R., Ramaiah M.V., Kumar J.R. Performance
range and range-rate measurements. Signal Processing. comparison of α-β-γ filter and kalman filter for CA,
2007;87(4):665−686. https://doi.org/10.1016/j. NCA target tracking using bistatic range and range rate
sigpro.2006.07.003 measurements. In: IEEE International Conference on
12. Compagnoni M., Notari R., Antonacci F., Sarti A. Communication and Signal Processing ICCSP. 2014, p.
On the statistical model of source localization based 1462−1466. https://doi.org/10.1109/ICCSP.2014.6950091
on range difference measurements. Journal of The 11. Petsios M.N., Alivizatos E.G., Uzunoglu N.K. Maneuvering
Franklin Institute. 2017;354(15):7183−7214. https://doi. target tracking using multiple bistatic range and range-rate
org/10.1016/j.jfranklin.2017.07.034 measurements. Signal Processing. 2007;87(4):665−686.
13. Дудник П.И., Кондратенков Г.С., Татарский Б.Г., Иль- https://doi.org/10.1016/j.sigpro.2006.07.003
чук А.Р., Герасимов А.А. Авиационные радиолокаци- 12. Compagnoni M., Notari R., Antonacci F., Sarti A.
онные комплексы и системы: учебник для слушателей On the statistical model of source localization based
и курсантов ВУЗов ВВС. М.: Изд. ВВИА им. проф. on range difference measurements. Journal of The
Н.Е. Жуковского; 2006. 1112 с. ISBN 5-903111-15-7 Franklin Institute. 2017;354(15):7183−7214. https://doi.
14. Skolnik M.I. Radar handbook: 3rd ed. USA: McGraw- org/10.1016/j.jfranklin.2017.07.034
Hill companies; 2008. 1352 p. 13. Dudnik P.I., Kondratenkov G.S., Tatarskii B.G., Il’chuk A.R.,
15. Swerling P. Maximum angular accuracy of a pulsed search Gerasimov A.A. Aviatsionnye radiolokatsionnye kompleksy
radar. Proceedings of the IRE. 1956;44(9):1146−1155. i sistemy: uchebnik dlya slushatelei i kursantov VUZov
https://doi.org/10.1109/JRPROC.1956.275167 VVS (Aviation radar complexes and systems: a textbook for
listeners and cadets of the Air Force universities). Moscow:
Izd. VVIA im. prof. N.E. Zhukovskogo; 2006. 1112 p. (in
Russ.). ISBN 5-903111-15-7
14. Skolnik M.I. Radar handbook: 3rd ed. USA: McGraw-Hill
companies; 2008. 1352 p.
15. Swerling P. Maximum angular accuracy of a pulsed search
radar. Proceedings of the IRE. 1956;44(9):1146−1155.
https://doi.org/10.1109/JRPROC.1956.275167
Российский технологический журнал. 2021;9(4):38–48
47An estimation of efficiency of filtering algorithms of state vector Boris A. Zaikin,
of small-sized observed object with Non-Markovian approximation of trajectory Alexander F. Kotov
Об авторах
Заикин Борис Александрович, к.т.н., системный администратор, отдел информационных технологий,
Городская клиническая больница им. М.Е. Жадкевича (121374, Россия, Москва, Можайское ш., д. 14). E-mail:
halfmazerkin@gmail.com.
Котов Александр Федорович, д.т.н., профессор, член диссертационного совета по специальности «Ра-
диотехника» Института радиотехнических и телекоммуникационных систем ФГБОУ ВО «МИРЭА – Российский
технологический университет» (119454, Россия, Москва, пр-т Вернадского, д. 78). E-mail: kotov_af@mail.ru.
About the authors
Boris A. Zaikin, Cand. Sci. (Eng.), System Administrator, Department of Information Technologies, M.E. Zhadkevich
City Clinical Hospital (14, Mozhaiskoe sh., Moscow, 121374 Russia) E-mail: halfmazerkin@gmail.com.
Alexander F. Kotov, Dr. Sci. (Eng.), Professor, Member of the Dissertation Council on Radio Engineering,
Institute of Radio Engineering and Telecommunication Systems, MIREA – Russian Technological University
(78, Vernadskogo pr., Moscow, 119454 Russia). E-mail: kotov_af@mail.ru.
Russian Technological Journal. 2021;9(4):38–48
48Вы также можете почитать