Продление темы "ПРЕЦИЗИОННАЯ ЛАЗЕРНАЯ МЕТРОЛОГИЯ ДЛЯ УСКОРИТЕЛЕЙ И ДЕТЕКТОРНЫХ КОМПЛЕКСОВ" на 2019-2021 гг - ОИЯИ
←
→
Транскрипция содержимого страницы
Если ваш браузер не отображает страницу правильно, пожалуйста, читайте содержимое страницы ниже
Продление темы «ПРЕЦИЗИОННАЯ ЛАЗЕРНАЯ МЕТРОЛОГИЯ ДЛЯ 1 УСКОРИТЕЛЕЙ И ДЕТЕКТОРНЫХ КОМПЛЕКСОВ» на 2019-2021 гг Азарян Н.С., Будагов Ю.А., Глаголев В.В, Ляблин М.В., Плужников А.А., Ширков Г.Д., Трубников Г.В (ОИЯИ) О. Брюннинг, Б. ди Джироламо, Ж-Кр. Гайде, Д. Мергенкухл, Л. Росси (CERN). Докладчик- Ляблин М.В

Лазерная Метрологическая Лаборатория 2 Размеры длина 23м Ширина 6м высота 3.5м

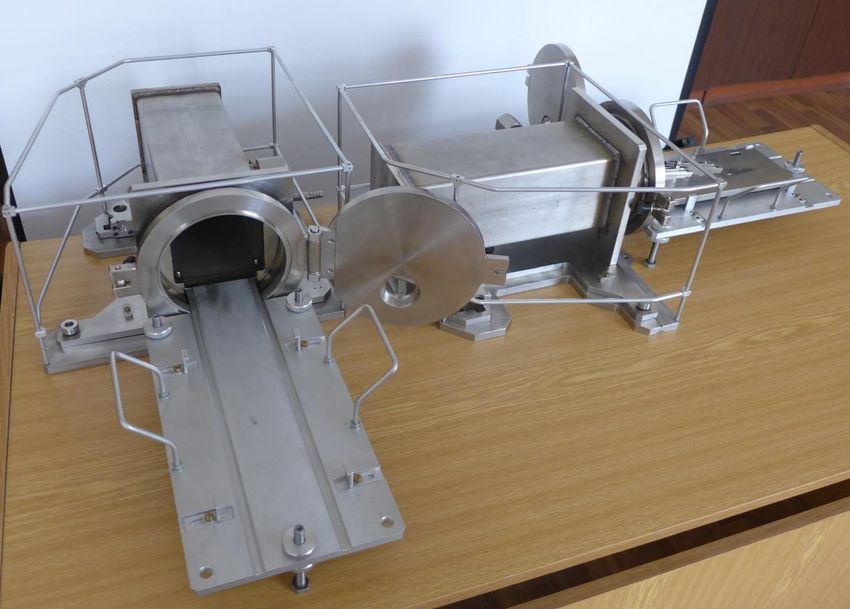
Серийный образец Прецизионного Лазерного Инклинометра 3 Январь 2017 Серийные образцы механических элементов Прецизионного лазерного Инклинометра изготовленных и собранных в ОИЯИ (Дубна).

Инсталляция ППЛИ в Транспортном тоннеле ЦЕРН 4 Октябрь 2017 В настоящее время реализована программа инсталляции ППЛИ в режиме полного дистанционного управления. Работы по совершенствованию ПЛИ перешли в стадию создания серийных образцов ПЛИ. Решены вопросы: дистанционного контроля за параметрами прибора, автоматической калибровка, корректной обработки сигналов углового наклона Земной поверхности.
Прецизионный Лазерный Инклинометр в Международной Геофизической обсерватории Гарни Армения 5 Начат суточный мониторинг микросейсмической активности в условиях Армянского нагорья

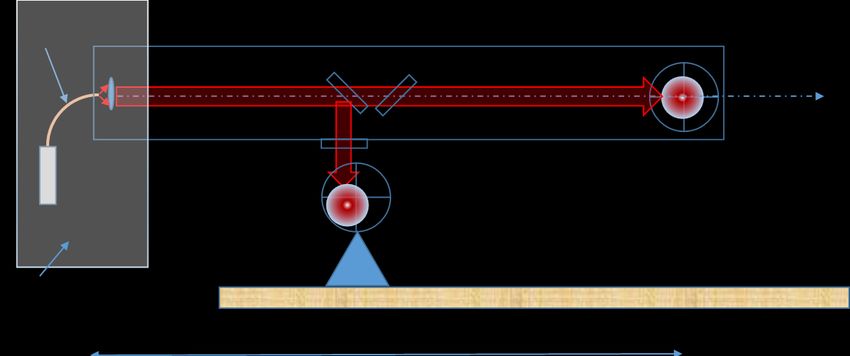
Схема Профессионального Прецизионного Лазерного Инклинометра 6/20 The Sensitive element PLI The Vacuum volume The Cuvette with liquid The Collimator Lens The laser beams from Prizm The optical fiber the prism faces Electrical Vacuum Feedthrough Positioners QPR1 ADC The laser beam QPR2 Mirror from the liquid The vacuum sensor K PC Fiber Optic Vacuum Feedthrough S1FC637 Laser Source Луч от лазера после отражения с поверхностью жидкость и направляется на фотоприёмник QPR1. Дополнительный луч отраженный от грани призмы направляется на QPR2 и служит для учёта шума блуждания лазерного луча.
Обработка сигналов в ППЛИ 3 7/20 10 8 6 4 2 0 -2 -4 -6 -8 -10 00:00 04:00 08:00 12:00 16:00 20:00 24:00 Окончательный результат обработки –наклоны земной поверхности в вертикальной и горизонтальной плоскости .
Зарегистрированные микросейсмические сигналы :удалённые землетрясения 8/20 6 Azimuth 1040 4 hor,ver(rad) 2 Vertical direction Magnitude Mw 4.6 0 Region NORTHERN ITALY Date time 2017-11-19 12:37:46.2 UTC Location 44.66 N ; 10.07 E -2 Depth 32 km -4 Azimuth 140 -6 -8 Horizontal direction 12:38 12:39 12:40 12:41 12:42 12:43 12:44 12:45 12:46 Time(h) Регистрация 4.8М бального Землетрясения в Италии 19ноября 2017
Зарегистрированные микросейсмические сигналы :угловые наклоны поверхности Земли Луной и Солнцем 9 Наблюдается периодический 12 часовый сигнал с амплитудой 0.16µrad от наклона земной поверхностью Луной и Солнцем
Зарегистрированные микросейсмические сигналы :Микросейсмический пик 10 hor,ver(rad) 4,6 4,4 Azimuth 1040 Vertical direction 4,2 4,0 Horizontal direction 0 3,8 Azimuth 14 3,6 19:08 19:09 19:09 19:10 19:11 19:12 19:12 19:13 Time(h) Регистрация периодического 1-10сек сигнала «Микросейсмического Пика»
Достигнутая чувствительность ППЛИ 11/20 0,001 1,6 rad/Hz1/2 (rad) 1,4 1,2 1,0 0,8 1E-4 0,6 0,4 2.4 10-11 rad/Hz1/2 0,2 14.11.2017 0,0 00:00 04:00 08:00 12:00 16:00 20:00 24:00 0,001 0,01 0,1 1 Time(h) Frequency (Hz) На данных измерения с относительно небольшим уровнем «Микросейсмического Пика» (< 0.1µrad)14 ноября 2017г. Зарегистрирован уровень микросейсмических колебаний 2.4 10-11рад/Гц1/2
Интерферометрический измеритель длины 12 The interferometric pattern 6 /2 Signal from Phd3 Signal Phd1+Phd2,Phd3 (rel. Un.) The movable platform 4 A B θ N Laser 2 L=/2 N Signal from Phd2+Phd1 0 The measured object 0 200 400 600 800 1000 Time (rel. un.) Phd2 Phd1 Расстояние определяется как количество максимумов N интерференционной картины между точками половинногопересечения лазерного луча измеряемого объекта L= λ/2 N
Определение калибровочного коэффициента в ПЛИ 13 Uint, Uinc Uint Uinc2 λ/4 Uincc Uinc1 T1 T2 T3 T4 Определяем изменение сигнала с инклинометра, которое соответствует угловому перемещению . Калибровочный коэффициент, определяется соотношением между углом наклона платформы θ и вольтовым сигналом с Прецизионного Лазерного Инклинометра
Эксперимент Uinc(V),Uint(V) d=N*/4=10*0.158m=1.58m 14 0.02 Uinc(tA) 0.00 Uinc=12.22mV Uinc(tB) -0.02 1780 1800 tA 1820 1840 tB 1860 Time(sec) На пьезоэлектрический позиционер подавалось линейно растущее напряжение в диапазоне 0-50 В. При 50В максимальное вертикальное смещение опоры B3 составляло d=1.58±0.01мкм и соответствовало калибровочному наклону основания на угол θ=d/L=3.95±0.03 мкрад
Лазерная Реперная Линия 15 В условиях термостабильной Лаборатории Создан прототип ЛРЛ на длину 9.5м в вакуумном исполнении. Проведены исследования совместимости измерений при помощи ЛРЛ и Лазерного Тахеометра АТ401 в воздушной среде на длине 50м . Точность совместных измерений 30мкм. Основные работы будут продолжены в создаваемой Лазерной метрологической Лаборатории
Предложения проектов на продление темы «ПРЕЦИЗИОННАЯ ЛАЗЕРНАЯ МЕТРОЛОГИЯ ДЛЯ УСКОРИТЕЛЕЙ И ДЕТЕКТОРНЫХ 16 КОМПЛЕКСОВ» на 2019-2021 гг Продление темы «Прецизионная лазерная метрология для ускорителей и детекторных комплексов» планируется к выполнению в ОИЯИ с 2019 года по 2021 год по следующим направлениям: Создание сети из шести Прецизионных лазерных инклинометров для цифровой визуализации деформации поверхности Земли сейсмическими Реллеевскими волнами. На основе Прецизионного Лазерного Инклинометра создание сейсмоизолированной от угловых колебаний поверхности Земли исследовательской платформы. Завершение работ по созданию Интерферометрического Измерителя Длины с длиной измерения 16м. Завершение работ по созданию прототипа вакуумированной Лазерной Реперной Линии длиной 130м в Лазерной Метрологической Лаборатории ЛЯП.
Сеть из шести Прецизионных Лазерных Инклинометров Величина остаточного блуждания фокусов ускорителей и фактор 17 увеличения светимости Earth surface Deformation Δx θ Detector LHC For θ=10-7rad Δx=5μm particle beam Δx particle beam θ Focus devices L=50m При угловом колебании поверхности Земли 10-7rad на частоте 3Гц амплитуда блуждания фокусов частиц может составить 5мкм
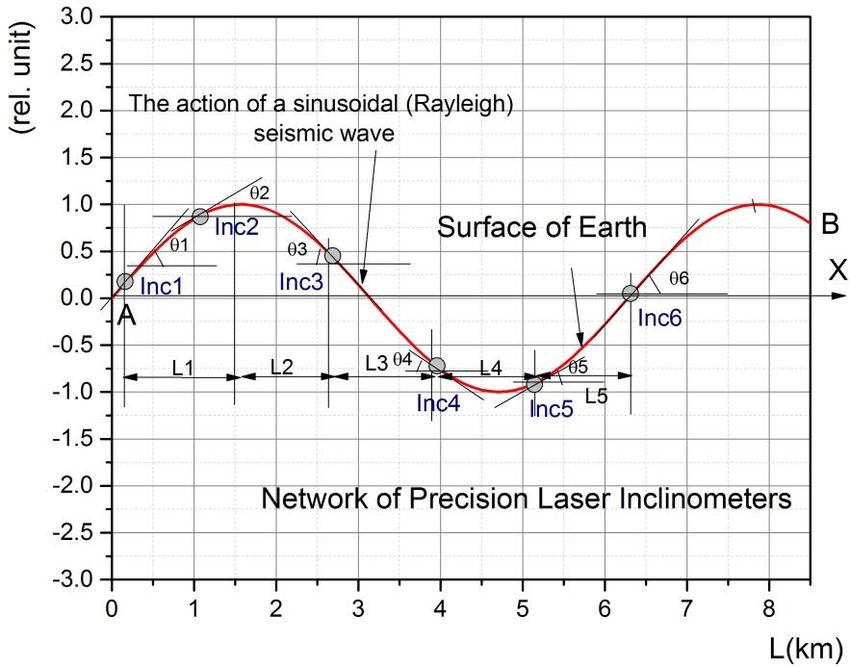
Принцип регистрации NETWORKом из ПЛИ деформации поверхности Земли сейсмическими волнами 18 The Direction of the PLI registration PLI2 PLI1 PLI3 PLI4 PLI6 PLI5 X L1 L2 L3 L4 L5 Среднее расстояние между инклинометрами выбирается из длины волны поверхностной волны. Для релеевских волн «Микросейсмического Пика» средняя частота регистрируемых колебаний составляет ν= 0.2Гц. При скорости реллеевской волны V=2км/сек длина волны составит = =10 км. Для визуализации одного периода этой волны необходимо как минимум шесть инклинометров. Среднее расстояние между инклинометрами составит Lср.=10км/6≈1.7км
Принцип регистрации NETWORKом из ПЛИ деформации поверхности
Земли сейсмическими волнами 2
19/20
Используя распределённую сеть ПЛИ можно визуализировать прохождение релеевской волны
на поверхности Земли.
Зная расстояние между Инклинометрами L1-L6 и регистрируемые углы θ1-θ7
+
можно рассчитать изменение высоты поверхности Земли ≈ + и соответственно измерить
изменение высоты расположения ПЛИ поверхности Земли под действием поверхностной волны.
Н={H1=h1; H2=h1+ h2;H3= h1+ h2+ h3;…. }Принцип регистрации NETWORKом из ПЛИ деформации поверхности Земли сейсмическими волнами 3 20 Y PLI1 PLI2 PLI3 PLI4 PLI5 PLI6 PLI7 PLI8 PLI9 PLI10 X PLI11 PLI12 PLI13 PLI14 PLI15 PLI16 PLI17 PLI18 PLI19 PLI20 PLI21 PLI22 PLI23 PLI24 PLI25 The Directions of the PLI registration При регистрации NETWORKом на плоскости (две ортогональные горизонтальные координаты X и Y) инклинометры располагаются в узлах пересечения взаимно перпендикулярных линий. Направление регистрации угловых колебаний в вертикальной и горизонтальных плоскостях всех ПЛИ совпадают и их направления параллельны осям X и Y В реальности как правило действуют несколько разнонаправленных волн типа «Микросейсмический пик» от разных источников с разной частотой. Поэтому мы будем наблюдать сложную картину стоячих волн. В этом случае необходимо совершенствовать описанный выше алгоритм вычисления.
Технические характеристики и задачи 21 NETWORKа из шести ПЛИ Точность регистрации инклинометра при онлайн регистрации поверхностной волны достигает 10 нрад. Средняя амплитуда угла наклона поверхности Земли от релеевских волн Микросейсмического пика ≈ 2 10-7 рад. Таким образом, точность регистрации деформации поверхности Земли релеевскими волнами «Микосейсмического Пика» составляет порядка 5%. Время регистрации и обработки и визуализации информации, поступающей из системы шести ПЛИ нами оценивается 0.1сек. Это позволит хорошо (20точек на период) описывать колебания поверхности Земли на частоте «Микросейсмического Пика» 0.2Гц. Задачи, которая ставится перед NETWORK первого этапа: зарегистрировать сам факт пространственной деформации поверхности Земли при прохождении релеевской волны. определить необходимое количество инклинометров для эффективной визуализации деформаций земной поверхности релеевскими сейсмическими волнами. Отработать эффективны алгоритмы обработки информации, поступающей с сети из шести ПЛИ.
Интерферометрический Измеритель Расстояний с длиной измерения 16м 22 Первые исследования выявили сильную чувствительность к юстировке интерферирующих лучей. Фактически, на длине 16м точность совмещения лучей должна достигать 0.1мм. Таким образом, для совмещения интерферирующих лучей на всей длине измерения (16м) необходимо достичь их коллинеарности лучше, чем 5 10-6 рад. (1” сек). Точность установки направляющих для каретки в Интерферометрическом Измерителе длины лучше 5 10-6 рад, но для корректной их установки требуется условия оптической лаборатории, которая будет введена в эксплуатацию к лету 2018года. Для уменьшения зависимости от высокоточной юстировки лазерных лучей предлагается модификация интерферометрического измерителя длины. В качестве интерферометра предлагается новый интерферометрический метод- «амплитудный Интерферометр». В амплитудном интреферометре» используется амплитудная модуляция мощности лазерного излучения на частотах от 1ГГц до 10 ГГц. В этом случае длина волны амплитудной модуляции 0.3м-0.03м значительно больше длины волны света 0.63мкм и, следовательно, при этом, значительно снижается зависимость работы измерителя длины от высокоточного позиционирования лазерных лучей.
Принцип «амплитудного» интерферометра Луч от лазера модулируется амплитудным модулятором синусоидальной функцией с частотой ν 23 = ( − ) Сигналы напряжения с Fd1 и Fd2 подаются на входы аналогового умножителя , где происходит их перемножение. В результате мы получаем сигнал = ∗ − = ( − − ) При движении подвижной платформы со скоростью V х=2Vt = ( − − ) На выходе амплитудного умножителя появляется переменный сигнал на частоте = определяемой скоростью движения призмы = И высокочастотный 2 сигнал = ( − − ) Используя фильтр выделяем полезный сигнал движения платформы на частоте
Интерферометрический Измеритель Расстояний с длиной измерения 16м на базе «амплитудного» интерферометра 24 Signal Fd1+Fd2,amplitude miltiplier (rel. Un.) 6 /2 Signal from amplitude miltiplier 4 C D 2 L=/2 N A B Signal from Fd2+Fd1 0 0 200 400 600 800 1000 Time (rel. un.) Сигналы с Fd3+Fd4 поступают на один вход двухканального АЦП, сигналы с дифференциального усилителя на другой вход. Задачи, которая ставится в процессе создания ИИП: Создание программы, обеспечивающей регистрацию сигналов их обработку и определение расстояний Апробирование идеи «амплитудного» интерферометра. Получение работоспособного прототипа для регистрации расстояния на длине 16м с точностью 10мкм.
Лазерная Реперная Линия 1 25 Лазерная реперная линия служит для непрерывного измерения координат точек NETWORK вдоль линии распространения лазерного луча. В качестве начала координат используется начало лазерного луча (точечный лазерный источник -торец оптического волокна) и конечная точка приёма лазерного луча- центр квадрантного фотоприёмника. Лазерная реперная линия сможет контролировать измеряемые точки NETWORK на единичной длине до 2км. Диаметр лазерного луча - = =4см
Лазерная Реперная Линия 2 26 Для создания эффективно работающей лазерной реперной линии необходимо непрерывно стабилизировать лазерный луч от шумовых эффектов блуждания лазерного луча, углового сейсмического наклона земной поверхности. Разработать неразрушающую систему регистрации положения измеряемой точки относительно стабильного положения лазерного луча (частично эта система разработана на ПЛИ ). Для эффективного неразрушающего контроля измеряемых точек необходимо изготовить прецизионные оптические плоскопараллельные пластинки с уровнем неплоскостности поверхностей выше 10-8рад. Подобная технология разработаны и прошла испытания. При помощи сейсмоизолированной платформы снизить влияние угловых микросейсмических колебаний поверхности Земли на лазерный луч. Положение точек NETWORK должны контролироваться как при помощи ЛРЛ так и внешней теодолитной системы для включения в глобальный NETWORK.
Схема Лазерной Реперной Линии в Лазерной Метрологической Лаборатории 27 QPr Vacuum Volume Pipe Laser Seismic isolation platforms 22m
Этапы работ по созданию прототипа Лазерной Реперной Линии 28 В условиях лазерной метрологической лаборатории (длина 23м) предполагается создание ЛРЛ в несколько этапов: ЛРЛ длиной 22м На этой длине отрабатывается элементы вакуумной системы, системы позиционирования начальной и конечной точек ЛРЛ, системы регистрации колебания лазерного луча. ЛРЛ длиной 66м Отработка системы трёхкратного отражения лазерного луча для наращивания длины 66м в вакуумных условиях. Отработка системы стабилизации блуждания лазерного луча. Отработка системы неразрушающего контроля измеряемой точки . ЛРЛ длиной 130м Угловая сейсмоизоляции начальной и конечных точек ЛРЛ. Установка начальной и конечных точек ЛРЛ на сейсмоизолированной платформе Определение точности измерения ЛРЛ
Сейсмоизолированная от угловых колебаний поверхности Земли исследовательская платформа The directions 29 of the Table orientation Suspension in the vacuum volume B The Optical table Piezostacer A C PLI Mirror QPr The directions The Optical table of the PLI orientation Система сейсмоизоляции исследовательской платформы Система определения качества сейсмоизоляции исследовательской платформы Достижимая величина сейсмоизоляции от угловых колебаний поверхности Земли Средний уровень угловых колебаний «Микросейсмического пика» в области частот [0.1Гц;2Гц] оценивается 2 10-7 рад. Точность измерения ПЛИ в режиме онлайн достигает величины 10 нрад. Следовательно, достижимый коэффициент подавления угловых колебаний «Микросейсмического пика» составит К≈20. Задачи, которая ставится в процессе создания СИП: Создание программы вырабатывающий сигнал обратной связи по показаниям ПЛИ для СИП Создание широкополосной системы определения качества сейсмоизоляции.
Создание сети Прецизионных Лазерных Инклинометров впервые создаст Заключение возможность визуализировать изменение ландшафта поверхности Земли при прохождении поверхностных сейсмических волн. Такая возможность позволит 30/20 перевести проблематику сейсмоизоляции крупномасштабных физических установок (коллайдеры, линейные ускорители частиц) в практическую плоскость. Создание сети ПЛИ позволит изучать долговременное изменение ландшафта с целью выявления зон на поверхности Земли с накоплением энергии деформации и тем самым такое развить новый количественный метод предсказания землетрясений Создание сейсмоизолированной от угловых колебаний поверхности Земли исследовательской платформы на основе данных измерений ПЛИ качественно улучшит условия проведения физического эксперимента, что неизбежно повлияет на увеличение их точности. СИП позволит создать сейсмоизолированные условия для целого ряда высокоточных технологических процессов, что повысит качество производимой продукции. Интерферометрический измеритель расстояний решит задачу объединения координатных систем NETWORKов в коллайдерных экспериментах Большого адронного коллайдера. Лазерная реперная линия поможет решить задачу онлайн контроля за положением ускорительных блоков линейного коллайдера, что станет эффективной заменой струнной реперной линии. Она может работать в радиационных условиях, что является принципиальным для линейных ускорителей. Создание перечисленных инструментов, помимо их важности по отдельности, является этапной работой в создании роботизированной измерительной системы обеспечивающий непрерывный автоматический метрологический измерительный процесс в подземных экспериментальных залах коллайдерных экспериментах.
Вы также можете почитать